| Top Page Index About Link Mail Form ●このページの応用機器製作します |
2012.5.15
以前、仕事でライントレーサを作ったことがありました。当然、要求された仕様は満たして無事納品されたのですが、既製品の改造だったこともあって色々技術的に改良の余地があると思っていました。それで Fusion PCBで安価に基板が作れるので一から作ってみました。
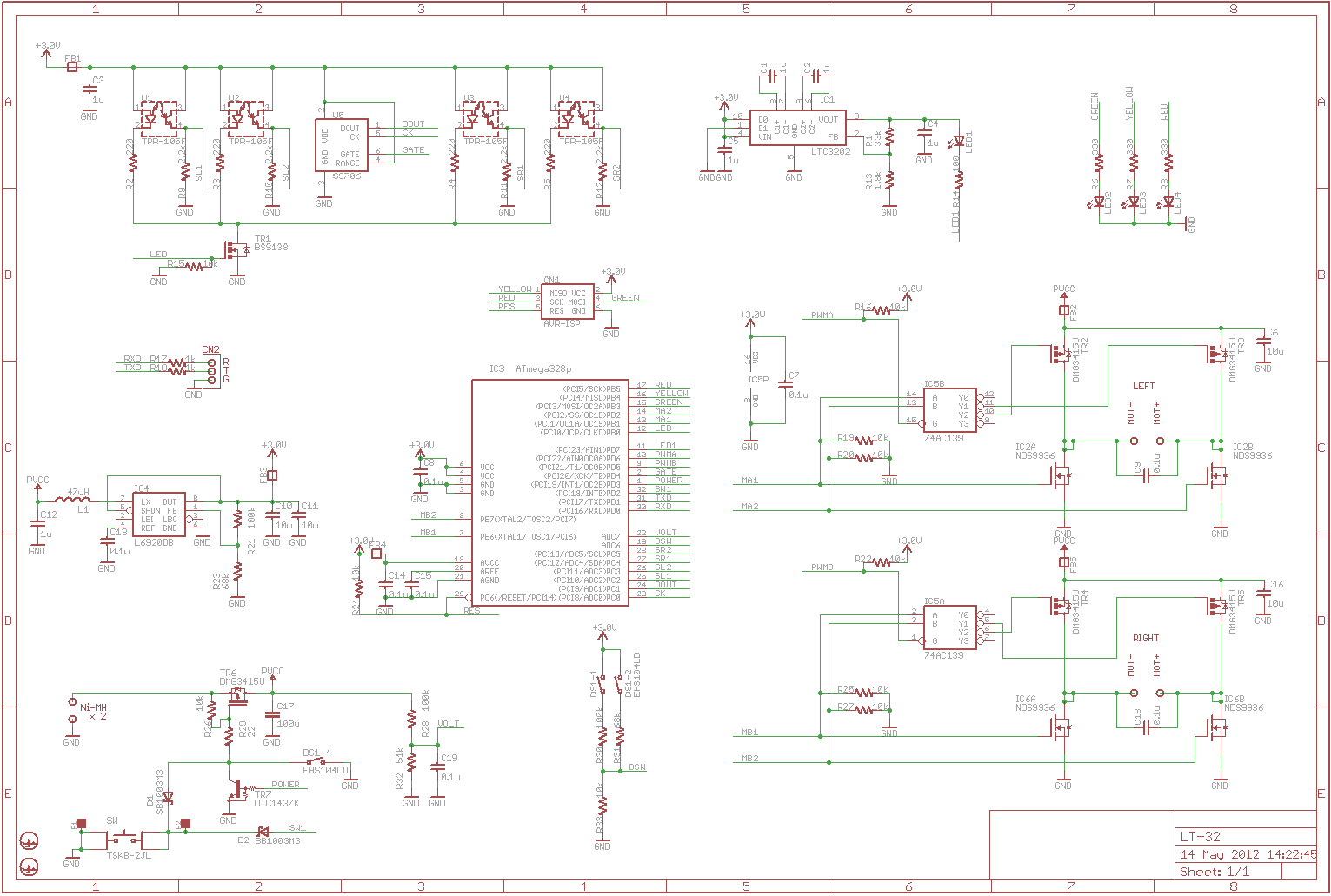
こちらの回路図は2号機作成後、DC/DCコンバータを変更したバージョンです。それ故に部品番号が以下の画像の物と違っている場合があります。コントローラは使い慣れた ATmega328pです。電源は入手性と、ある程度稼働時間をとりたかったので単四Ni-MH電池2本を使います。電池の消耗具合でセンサーの値が変わるのは困るので DC/DCコンバータで 3.0Vに昇圧してロジック回路電源を安定化させています。更にカラーセンサー用の白色LEDの為に専用の DC/DCコンバータも搭載しています。
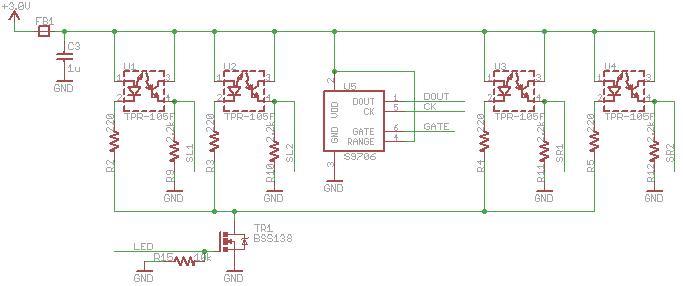 こちらはセンサー部分の回路です。中央はカラーセンサー S9706で、あとの4つは普通の赤外線反射センサー TPR-105F(D)です。色つきのラインを検出したらなんか演出するつもりなのでこういう構成になっています。最初に作ったライントレーサはカラーセンサー3個で構成していましたが、1個 900円もするので。
こちらはセンサー部分の回路です。中央はカラーセンサー S9706で、あとの4つは普通の赤外線反射センサー TPR-105F(D)です。色つきのラインを検出したらなんか演出するつもりなのでこういう構成になっています。最初に作ったライントレーサはカラーセンサー3個で構成していましたが、1個 900円もするので。
赤外線反射センサーの動作については ChaNさんの卓上ライントレースロボットとほぼ同じです。赤外線LEDを ON/OFFしつつ、A/Dコンバータで反射光の強さを測定します。ポートが足りなくなったので赤外線LEDの ON/OFFは全部同時になってたりはしますが。カラーセンサーの光源の白色LEDも ON/OFFして測定することで外光の影響をある程度相殺します。
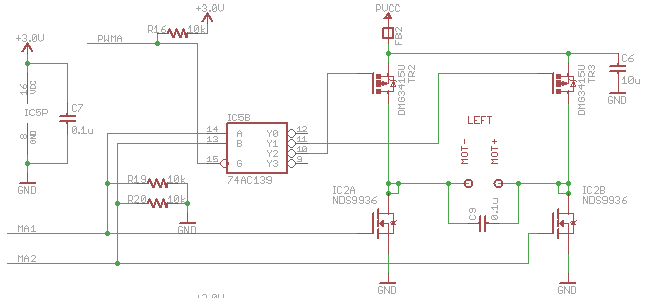 モーター駆動部分の回路です。最近秋月で売られているフルブリッジドライバ BD6211F-E2が使えると簡単なのですが、電圧が 3V以上でないと使えません。今回はロジック回路は DC/DCコンバータで 3.0V供給してはあるものの、効率や過負荷などで問題が起きそうなのでモーターの電源は Ni-MH電池2本そのままで動作させます。電圧が低くて上記ドライバは使えないのでディスクリートの FETとロジックICで構成します。
モーター駆動部分の回路です。最近秋月で売られているフルブリッジドライバ BD6211F-E2が使えると簡単なのですが、電圧が 3V以上でないと使えません。今回はロジック回路は DC/DCコンバータで 3.0V供給してはあるものの、効率や過負荷などで問題が起きそうなのでモーターの電源は Ni-MH電池2本そのままで動作させます。電圧が低くて上記ドライバは使えないのでディスクリートの FETとロジックICで構成します。
| MA1 | MA2 | PWMA | モーター |
|---|---|---|---|
| L | L | - | フリー |
| H | L | H | フリー |
| L | 正転 | ||
| L | H | H | フリー |
| L | 逆転 | ||
| H | H | - | ブレーキ |
PWMAはタイマーの PWM出力を使います。このデューティ比で回転数を制御します。ファームウェアでタイマ0を位相基準PWM動作モードで使い、右側と左側で交互に ONになるようにしてあります。
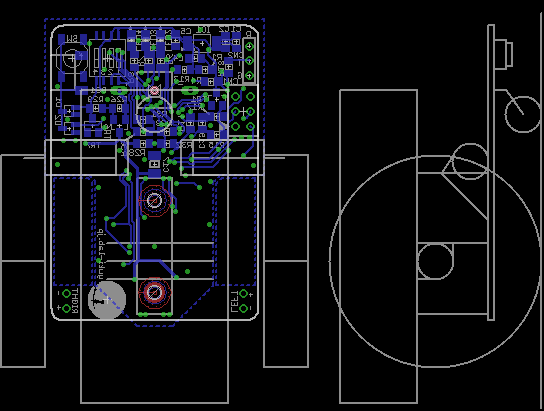 基板のアートワーク中の画面。シンプルメカなので基板CAD上で全体のレイアウト設計もしています。基板の外側にガーバデータには出力されないレイヤでタイヤや電池BOXなどを描いて完成像をイメージしつつ設計。
基板のアートワーク中の画面。シンプルメカなので基板CAD上で全体のレイアウト設計もしています。基板の外側にガーバデータには出力されないレイヤでタイヤや電池BOXなどを描いて完成像をイメージしつつ設計。
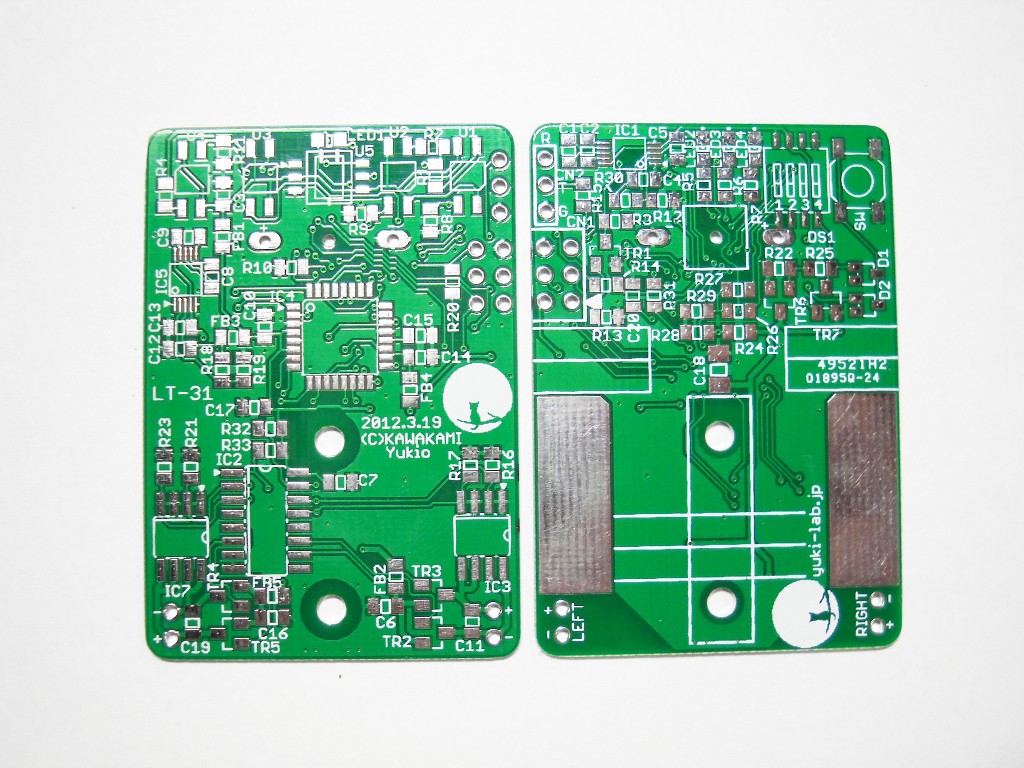
基板のサイズは 35mm x 50mm。厚みは 0.8mmで発注しました。
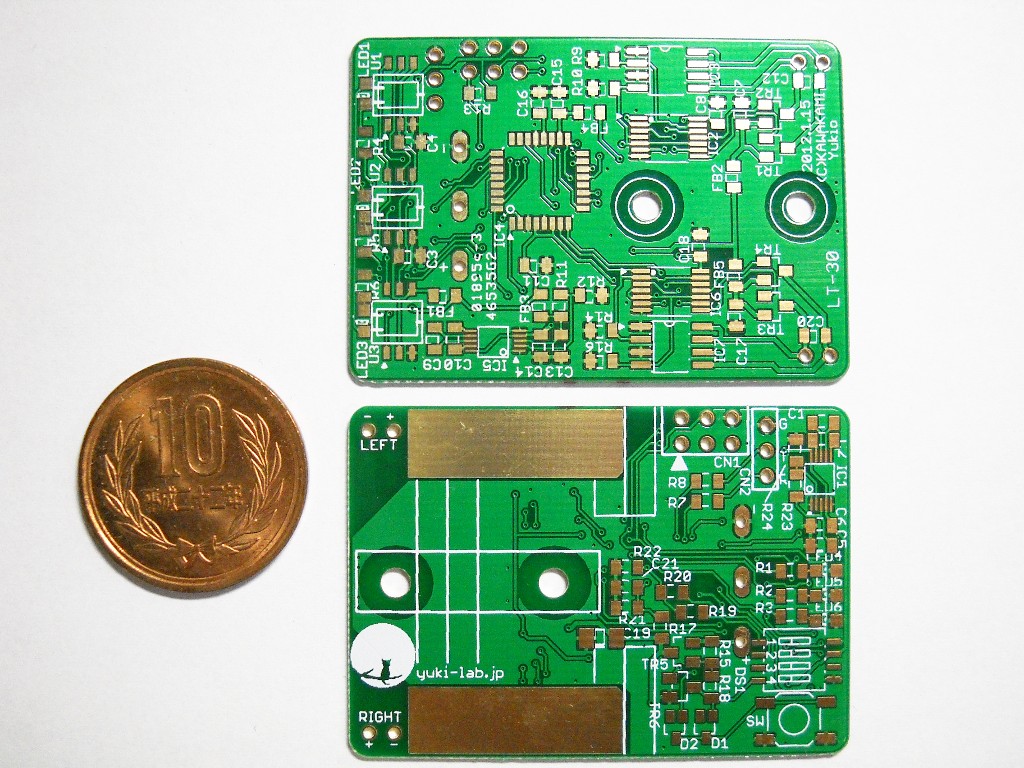 最初に作った基板。
最初に作った基板。
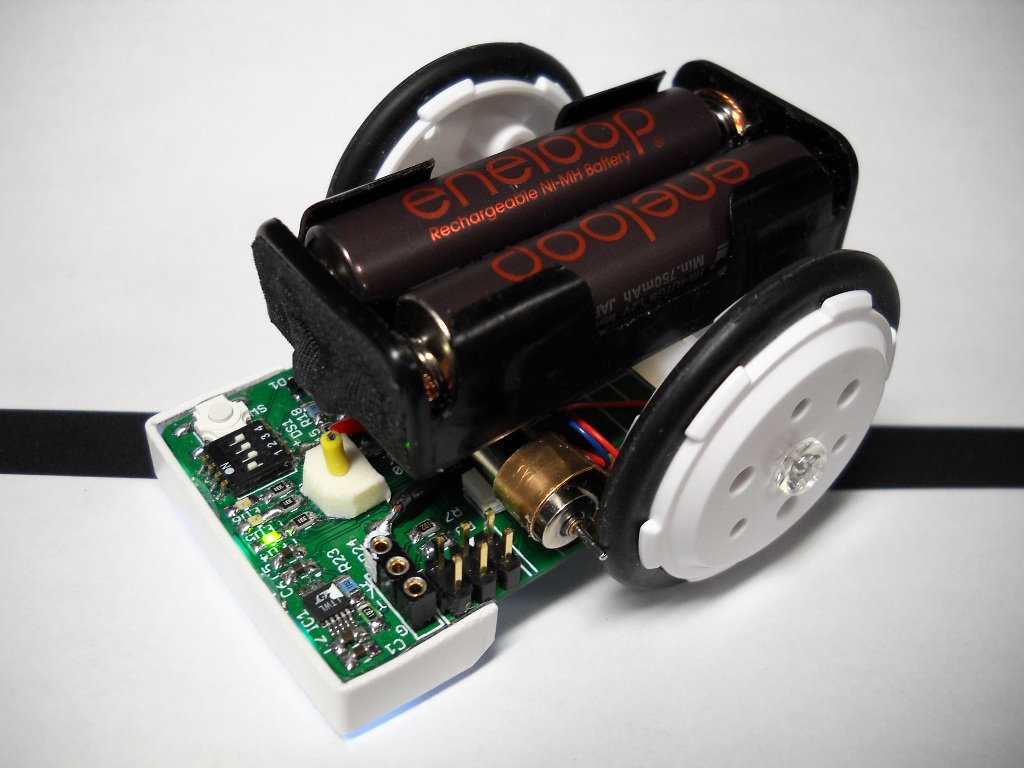
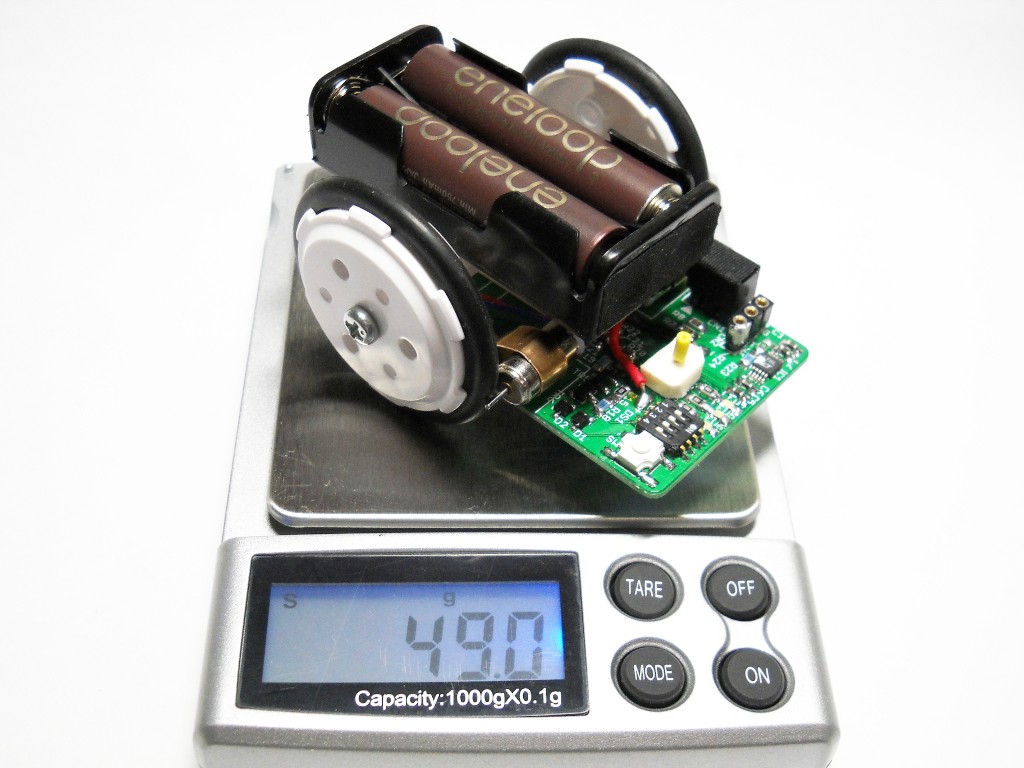 最初の機体。単四エネループ2本だけで 23gもあるので、重量の半分は電池です。
最初の機体。単四エネループ2本だけで 23gもあるので、重量の半分は電池です。
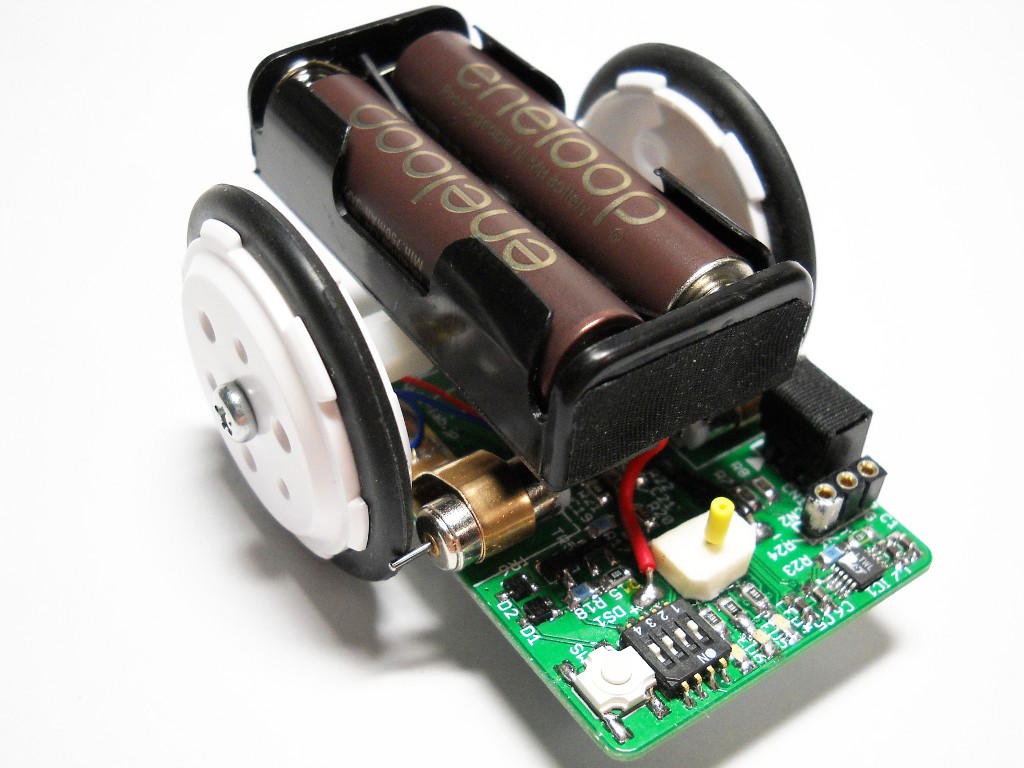 最初の機体のクローズアップ
最初の機体のクローズアップ
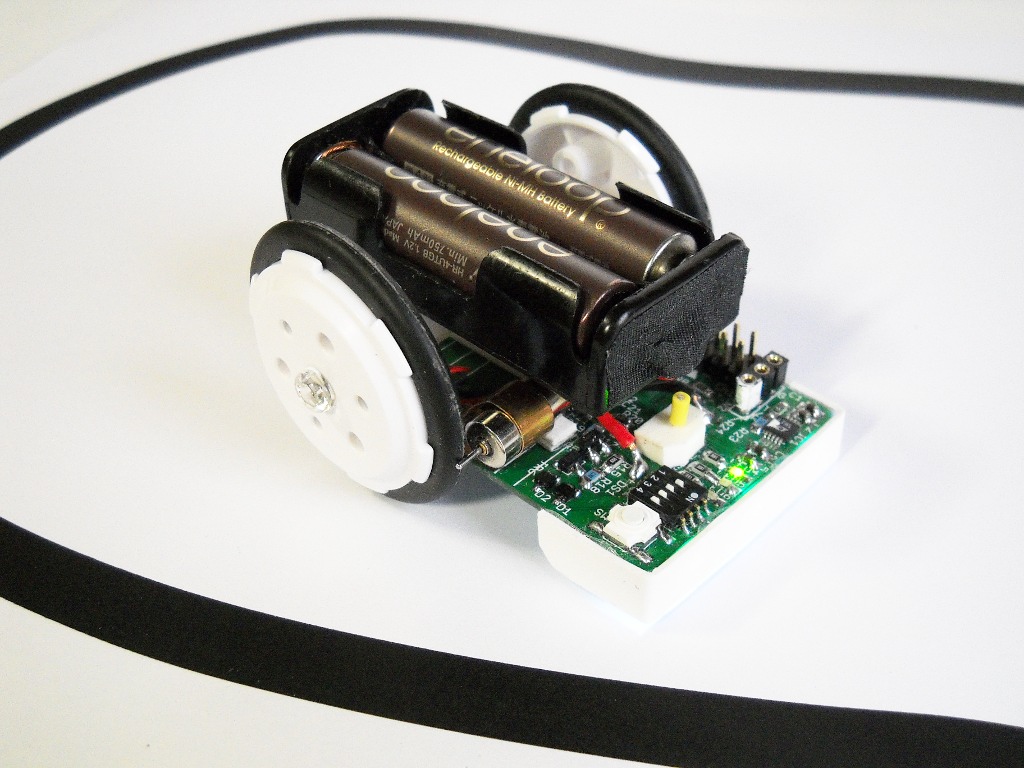
 裏側。ライン検出用にカラーセンサーを3個使っています。このバージョンではモーター駆動回路が上記とは異なっています。PWM制御をタイマー割り込みでソフトウェア的に行ってます。2号機では完全ハードウェアでやっているので CPU負荷が小さいです。PWM周期も1号機では約1kHzですが、2号機では約16kHzになっています。なので1号機が走行すると「ピー」という音がします。
裏側。ライン検出用にカラーセンサーを3個使っています。このバージョンではモーター駆動回路が上記とは異なっています。PWM制御をタイマー割り込みでソフトウェア的に行ってます。2号機では完全ハードウェアでやっているので CPU負荷が小さいです。PWM周期も1号機では約1kHzですが、2号機では約16kHzになっています。なので1号機が走行すると「ピー」という音がします。
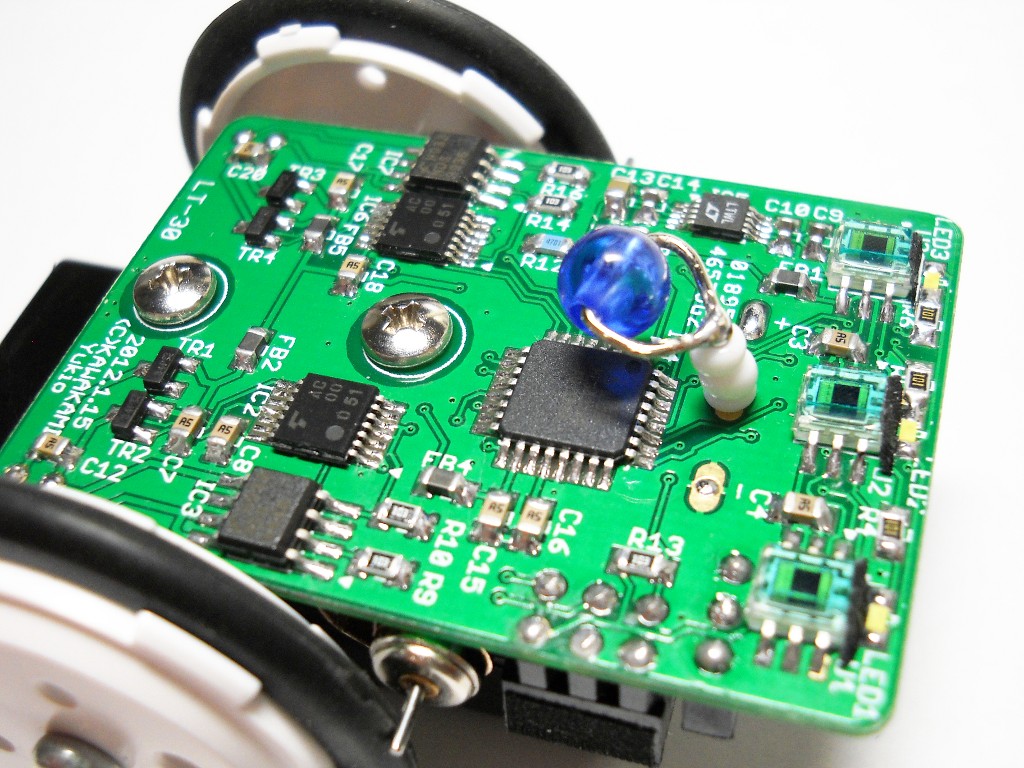
 盤面上。
盤面上。
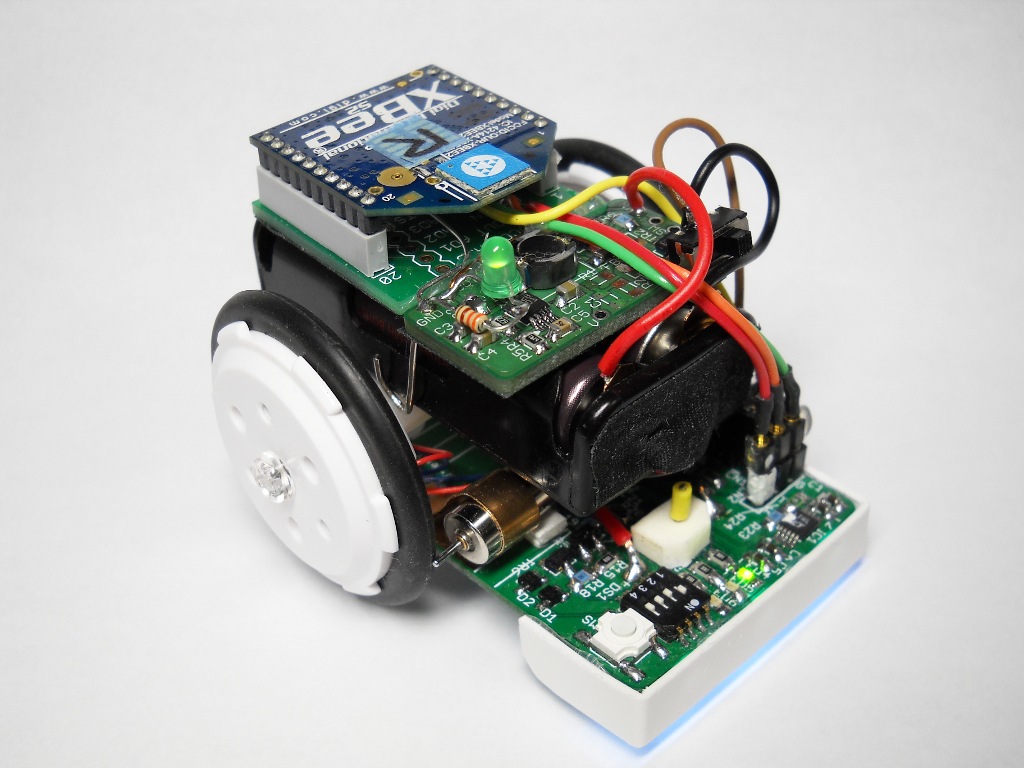 デバッグ・調整用に XBeeを使った無線ユニットを搭載してみました。このユニットだけで約10gあります。重量が2割も増。
デバッグ・調整用に XBeeを使った無線ユニットを搭載してみました。このユニットだけで約10gあります。重量が2割も増。
 盤面上。
盤面上。
 最初の機体の欠点を修正した基板を作成。
最初の機体の欠点を修正した基板を作成。
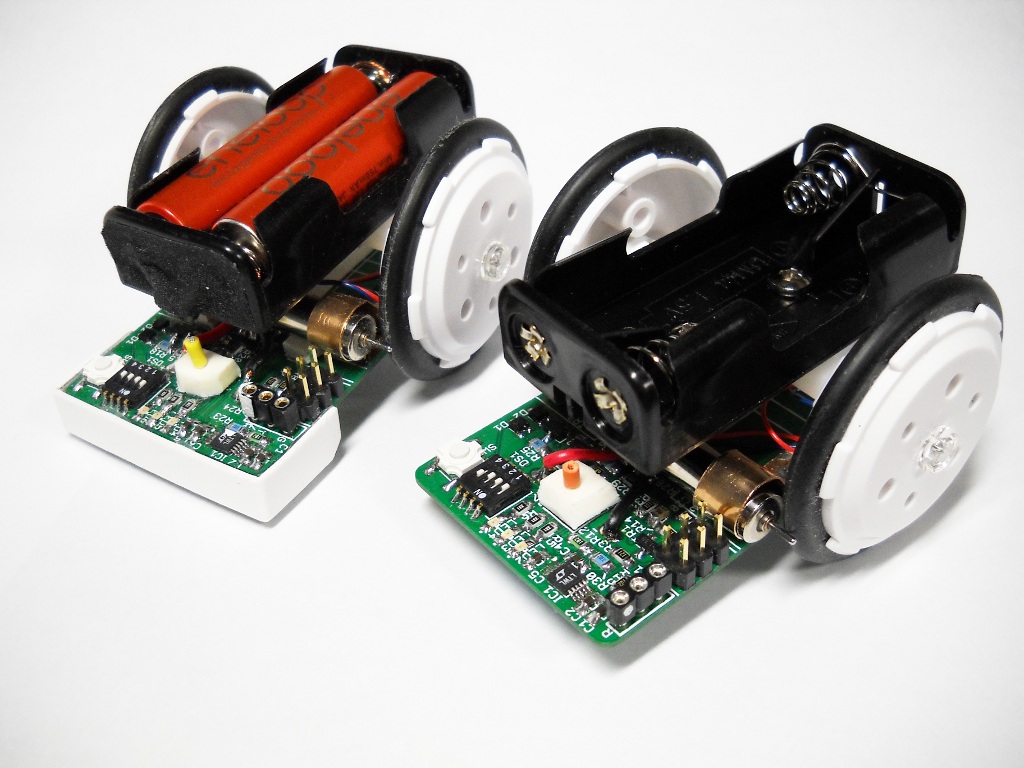 旧機種と新しい機体。
旧機種と新しい機体。
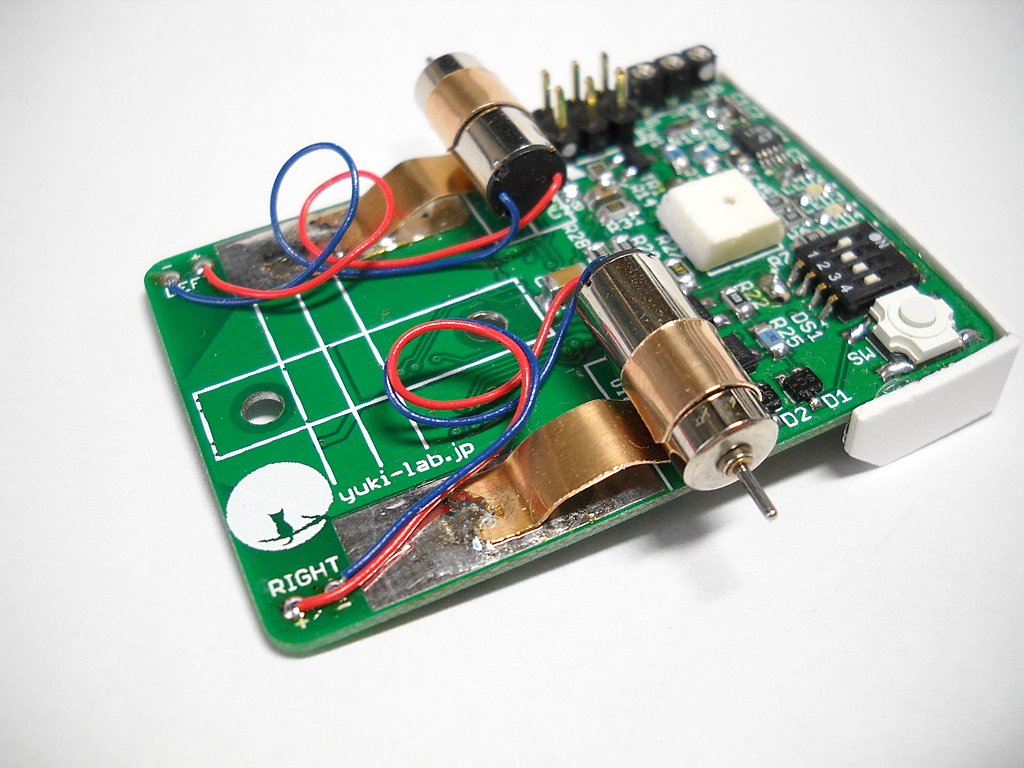
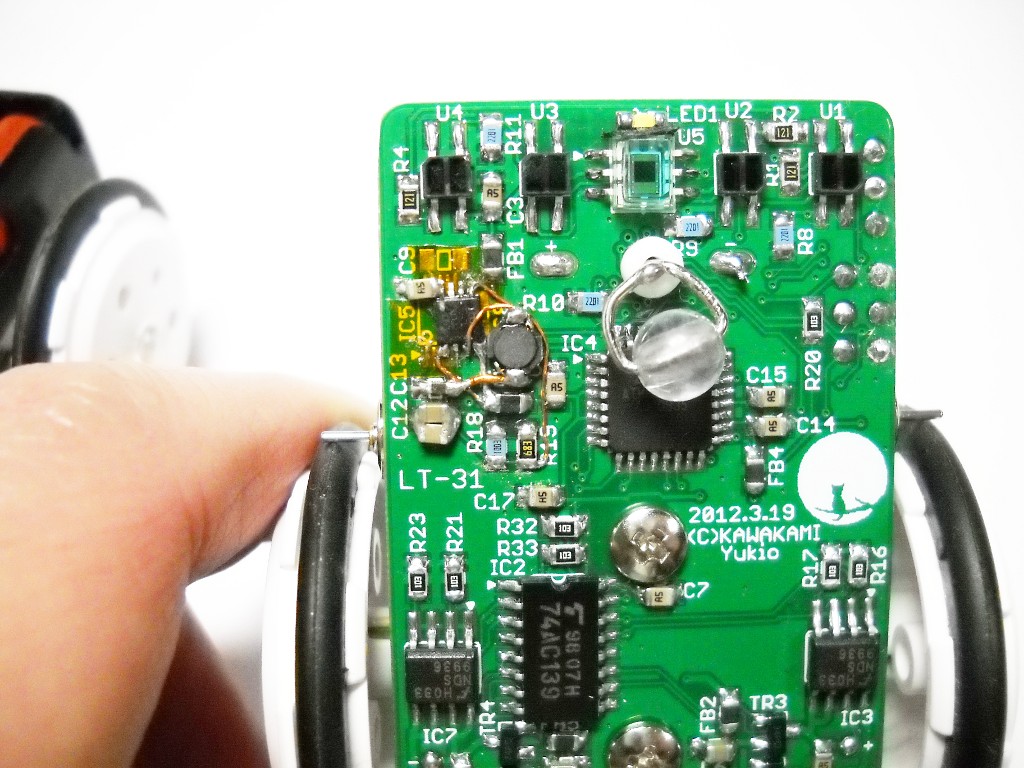 新しい機体の裏側。電源回路の力不足が露見したので DC/DCコンバータ回路を追加。これでこのページの最初の回路図と同等になっています。
新しい機体の裏側。電源回路の力不足が露見したので DC/DCコンバータ回路を追加。これでこのページの最初の回路図と同等になっています。
 2号機。
2号機。
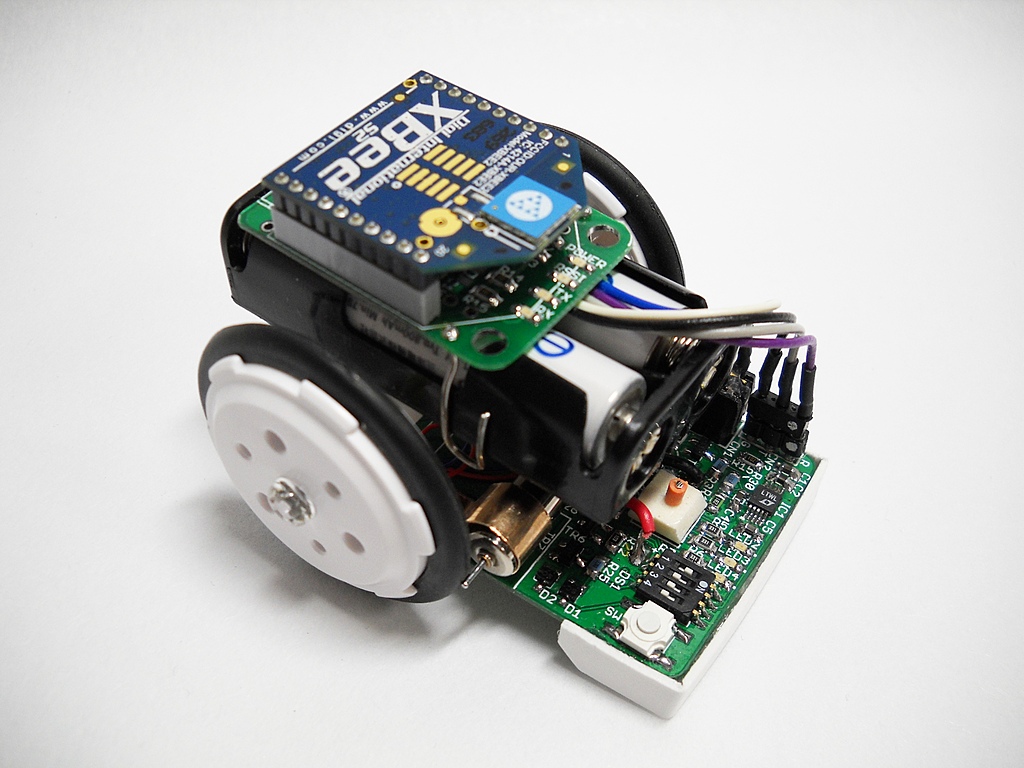 2号機に無線ユニットを載せた。専用基板を作ったので実にスマート。
2号機に無線ユニットを載せた。専用基板を作ったので実にスマート。
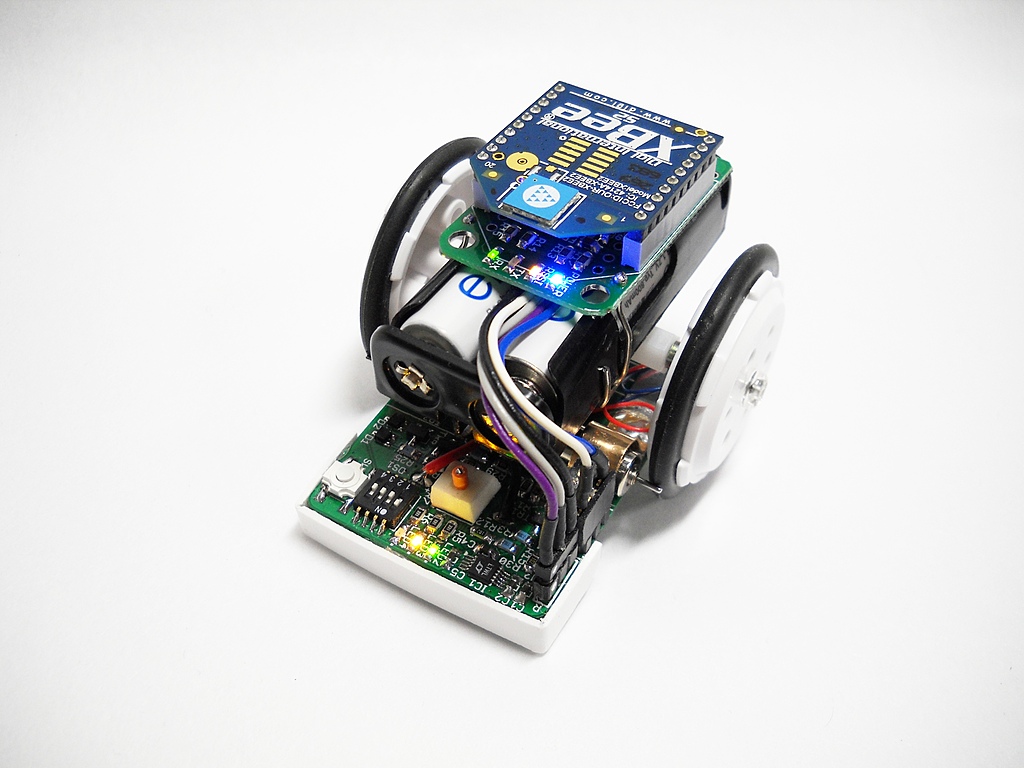 無線ユニット経由でファームウェアの書き換えが可能です。ただいま書き換え中。
無線ユニット経由でファームウェアの書き換えが可能です。ただいま書き換え中。
 XBeeの無線ユニットの基板も作ってみました。
XBeeの無線ユニットの基板も作ってみました。
 無線ユニットを組み立てたところ。パソコン側のユニットはタカチの PS型ポータブルケースに入れてみました。ライントレーサ搭載側の重量は 7.3g。思ったより軽量化できなかった。
無線ユニットを組み立てたところ。パソコン側のユニットはタカチの PS型ポータブルケースに入れてみました。ライントレーサ搭載側の重量は 7.3g。思ったより軽量化できなかった。
ライントレーサは走りまわりますので、いちいちコードをつないだり外したりしてデバッグするのは大変です。これを作るとデバッグが楽になります。また、走行具合の PID制御等のパラメータの微調整も走行しながら少しづつ変更できます。
 前輪は旋回の負荷にならないようにしつつ、重量を支える必要があります。ちょうどいい既製品は見つからなかったので自作します。
前輪は旋回の負荷にならないようにしつつ、重量を支える必要があります。ちょうどいい既製品は見つからなかったので自作します。
こちらは百均で買ってきたビーズ玉。大きい方はキャスターのタイヤに使います。小さい方は基板との間に入れて回転しやすいようにします。いろんなサイズがある(バラついているとも言う)ので選べば高さ調節もできます。
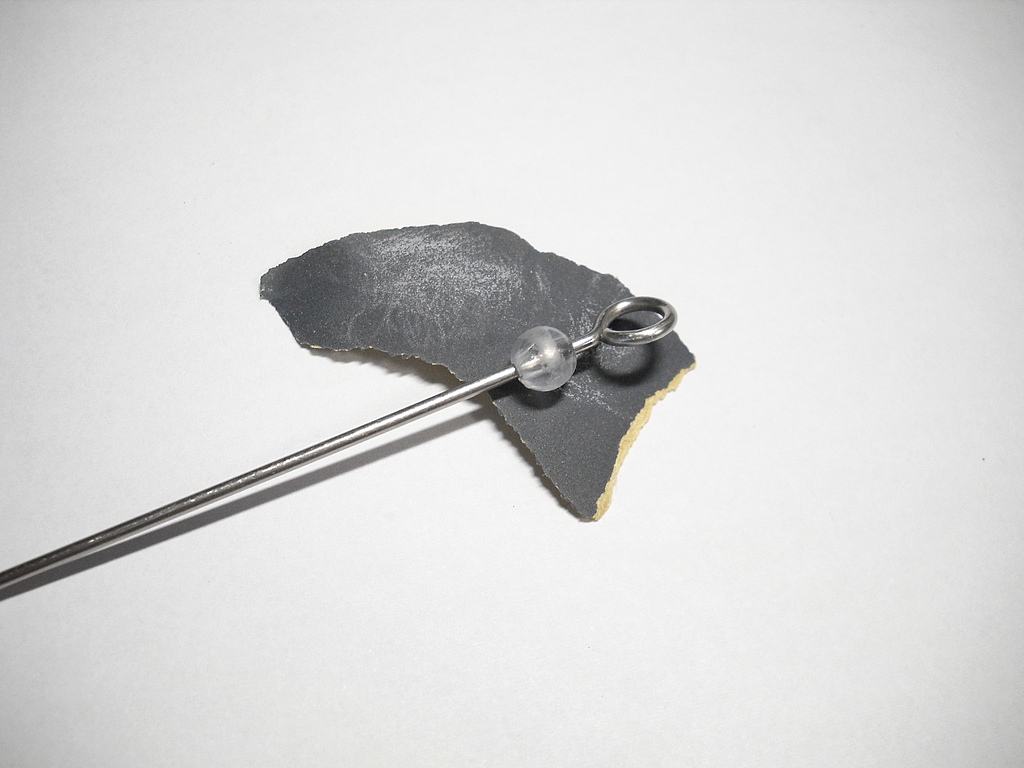 安物のビーズ玉は合わせ目があるので、転がりやすいように合わせ目を目の細かい紙やすりで削ります。削る際は画像のように軸に通してやるとやりやすいです。まあ、それほど神経質になることもないとは思いますが。
安物のビーズ玉は合わせ目があるので、転がりやすいように合わせ目を目の細かい紙やすりで削ります。削る際は画像のように軸に通してやるとやりやすいです。まあ、それほど神経質になることもないとは思いますが。
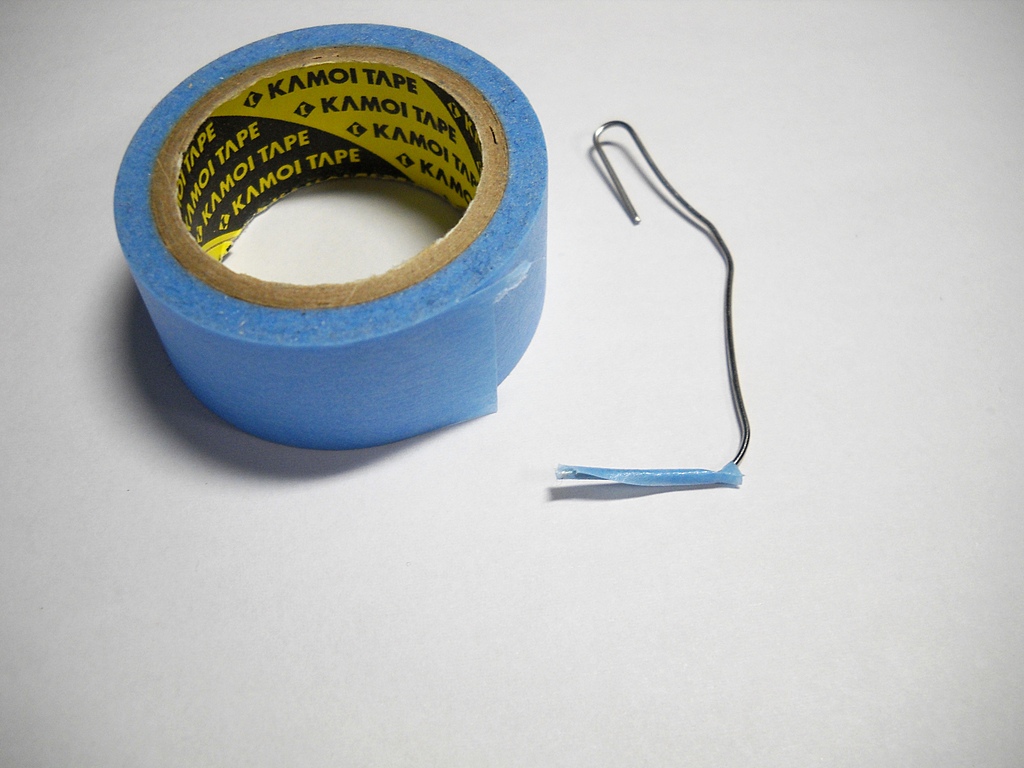 キャスターの軸として事務用クリップを使います。整形してハンダづけをするわけですが、ビーズ玉が熱に弱いのでビーズ玉の穴に通す部分をマスキングテープでカバーしておきます。
キャスターの軸として事務用クリップを使います。整形してハンダづけをするわけですが、ビーズ玉が熱に弱いのでビーズ玉の穴に通す部分をマスキングテープでカバーしておきます。
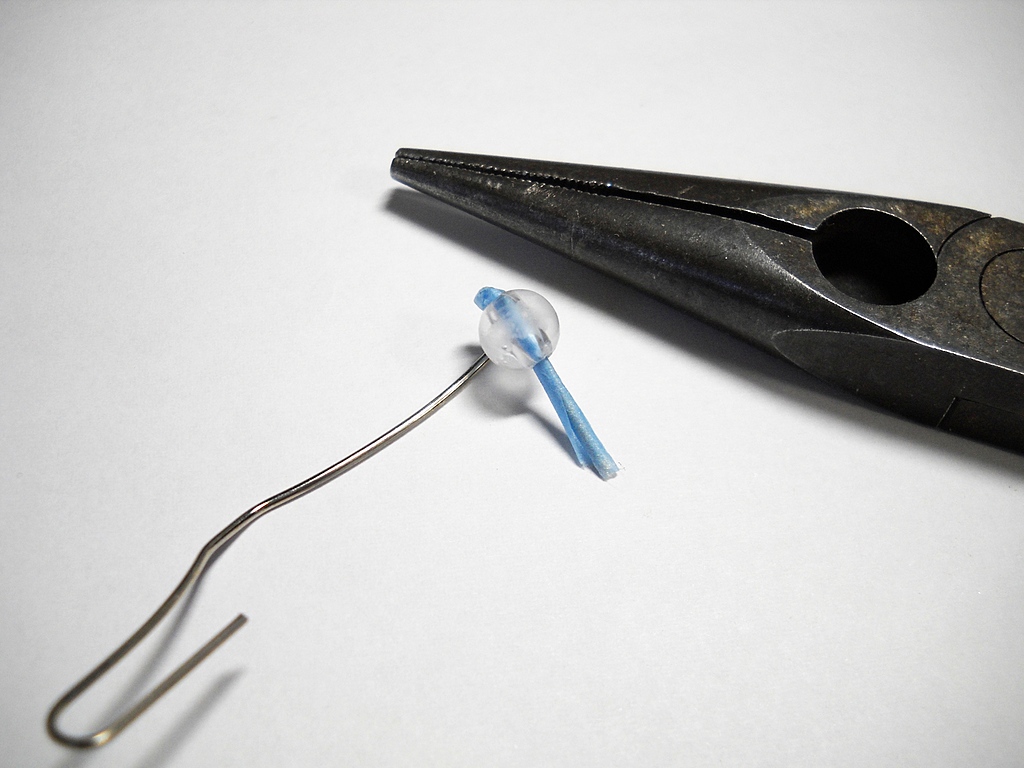 ラジオペンチで整形します。
ラジオペンチで整形します。
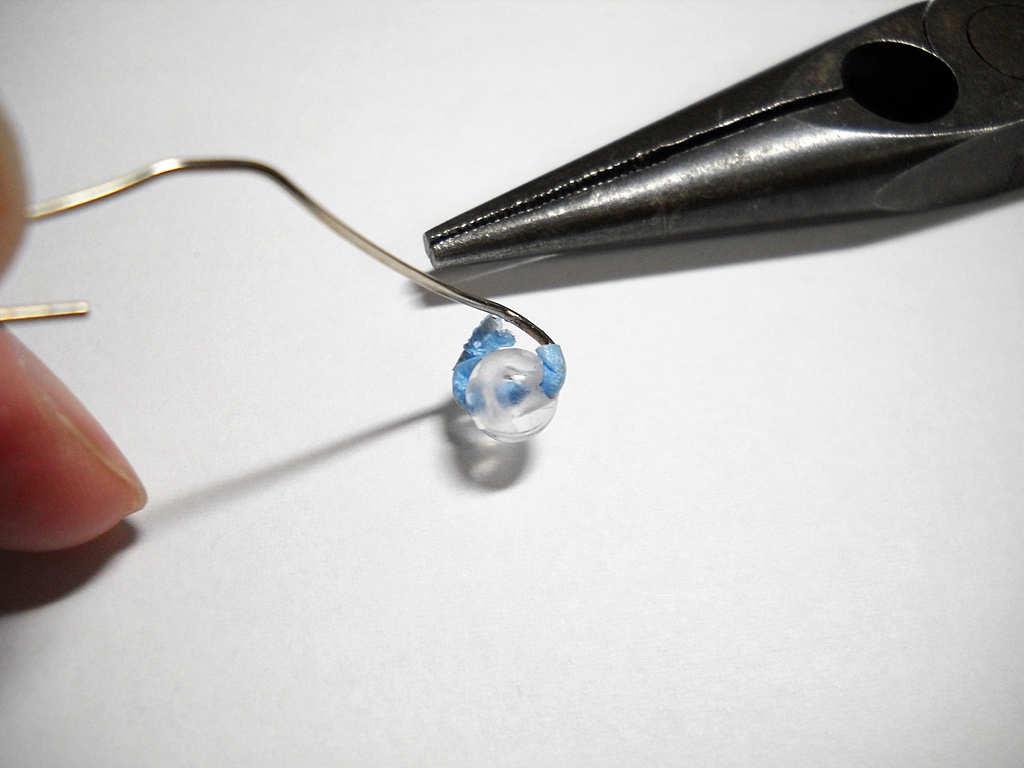 くるっと曲げます。余分な長さの分はニッパーでカット。
くるっと曲げます。余分な長さの分はニッパーでカット。
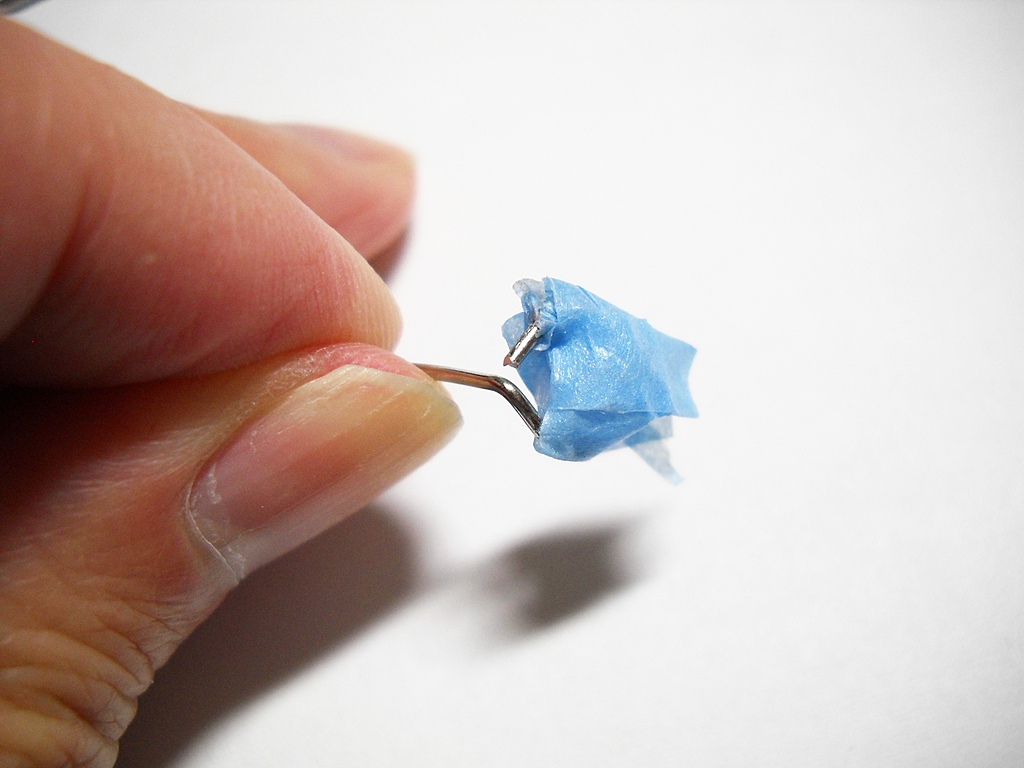 形が整ったら更にビーズ玉の外側をマスキングテープで養生します。これは、ハンダづけするとそのヤニが飛んでビーズ玉に付着して溶けてしまう(実際に溶けたので作りなおした (;_;))のを防ぐため。とにかくこのビーズ玉は熱に弱い。
形が整ったら更にビーズ玉の外側をマスキングテープで養生します。これは、ハンダづけするとそのヤニが飛んでビーズ玉に付着して溶けてしまう(実際に溶けたので作りなおした (;_;))のを防ぐため。とにかくこのビーズ玉は熱に弱い。
 軸をハンダづけします。養生してあるとはいえ、手早くするに越したことはありません。
軸をハンダづけします。養生してあるとはいえ、手早くするに越したことはありません。
 マスキングテープを取り去った後。
マスキングテープを取り去った後。
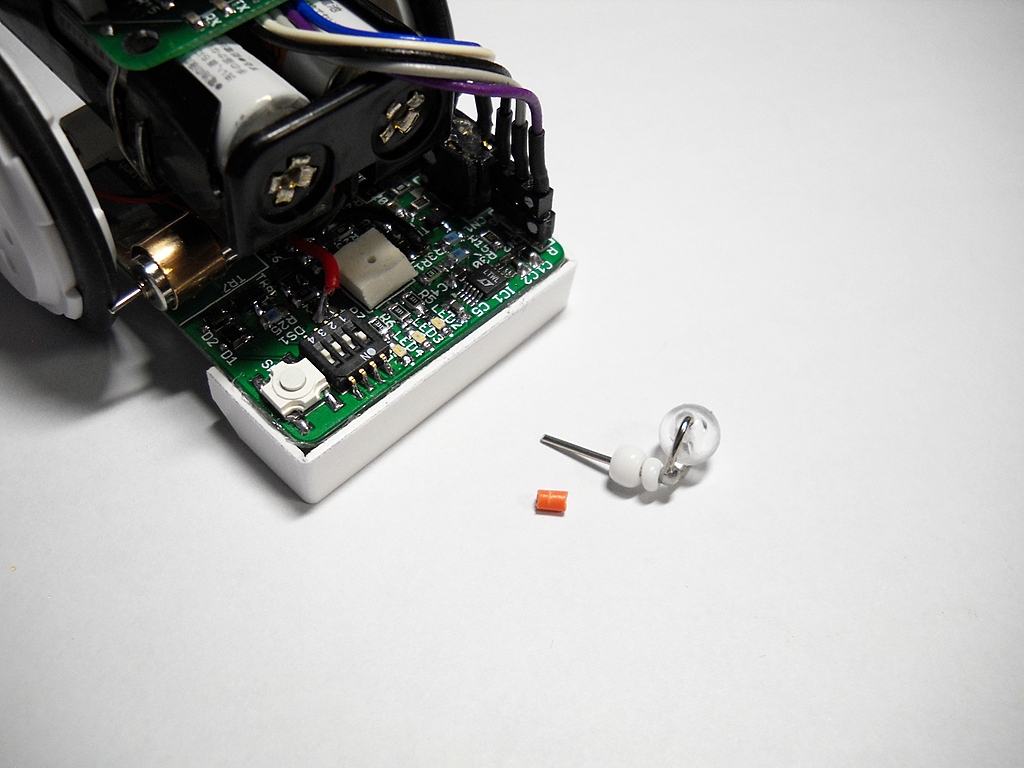 形を修正して余分な部分をカットします。小さいビーズをいくつか通して高さ調整をします。抜け止めはその辺にあったビニール線の被覆を剥いた物。全体を持ち上げた時にキャスターが抜けなければいいので適当です。
形を修正して余分な部分をカットします。小さいビーズをいくつか通して高さ調整をします。抜け止めはその辺にあったビニール線の被覆を剥いた物。全体を持ち上げた時にキャスターが抜けなければいいので適当です。
材料は豊富に余っているので、なんなら気の済むまで作り直してもいいでしょう。実はこれで4,5個作っている。
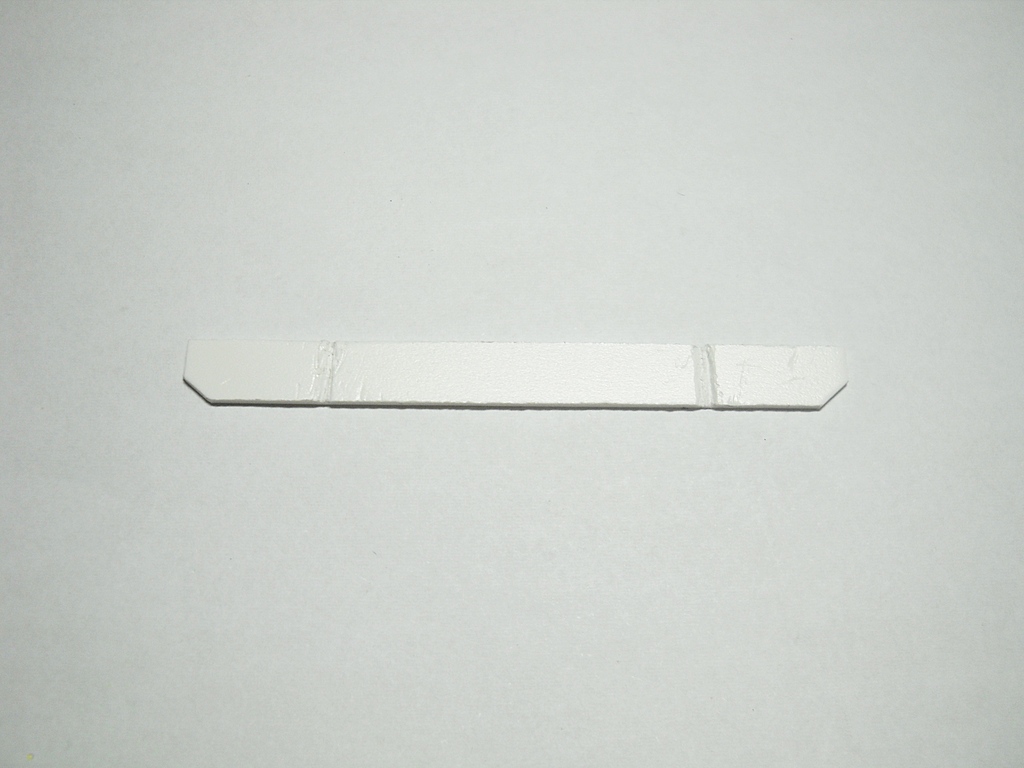 衝突時の衝撃軽減・部品保護・外光遮断の為にバンパーを作成します。1mm厚のフォーレックスを切り出します。曲げる部分の内側を削っておきます。
衝突時の衝撃軽減・部品保護・外光遮断の為にバンパーを作成します。1mm厚のフォーレックスを切り出します。曲げる部分の内側を削っておきます。
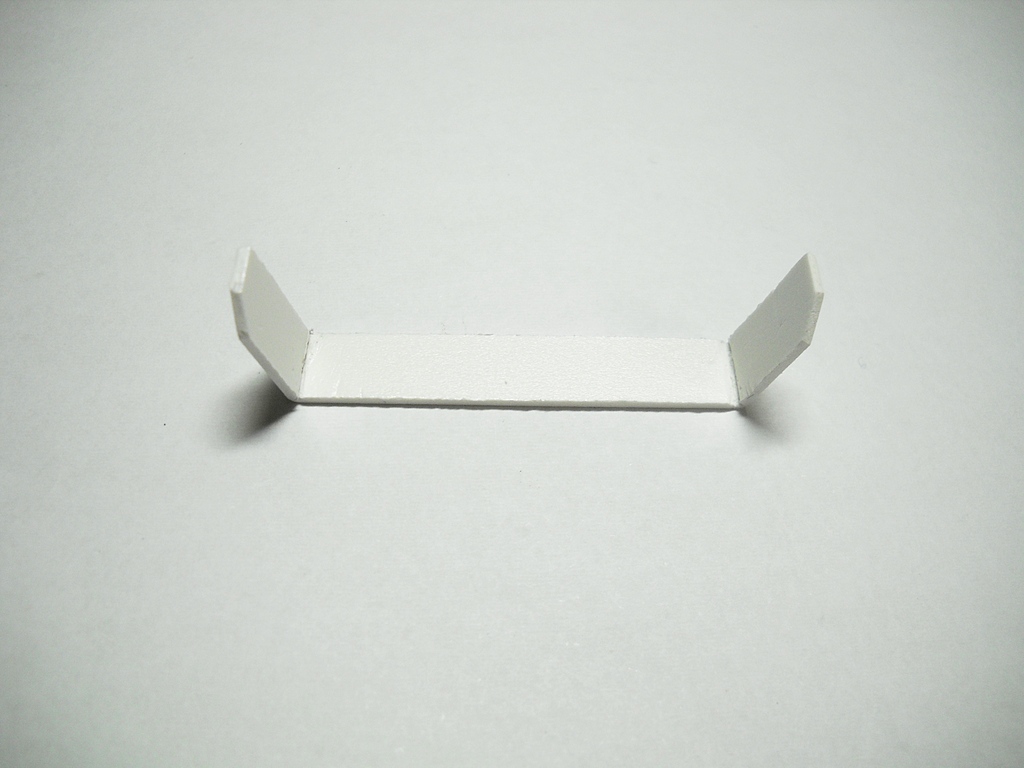 バンパーを曲げたところ。この後、ホットボンドで基板にとりつけます。
バンパーを曲げたところ。この後、ホットボンドで基板にとりつけます。
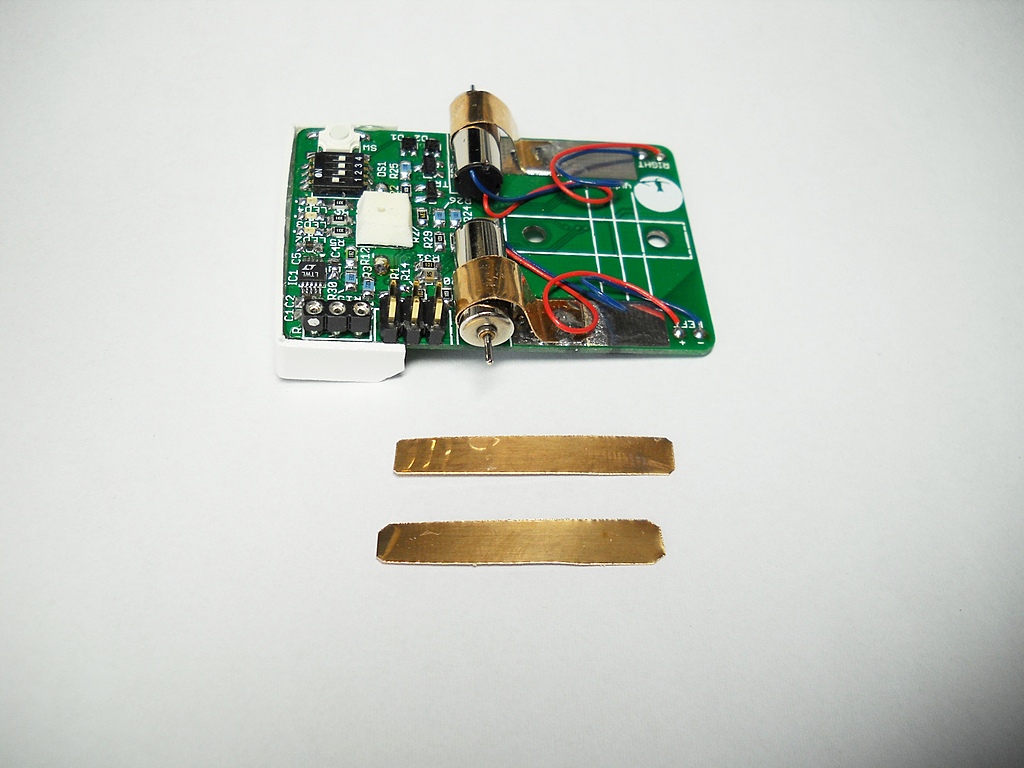 2号機の最初のモーター固定バネはちょっと強すぎてうまく回転しなかったので作り直します。0.2mm厚のリン青銅版を 5mm x 30mmに切り出し。
2号機の最初のモーター固定バネはちょっと強すぎてうまく回転しなかったので作り直します。0.2mm厚のリン青銅版を 5mm x 30mmに切り出し。
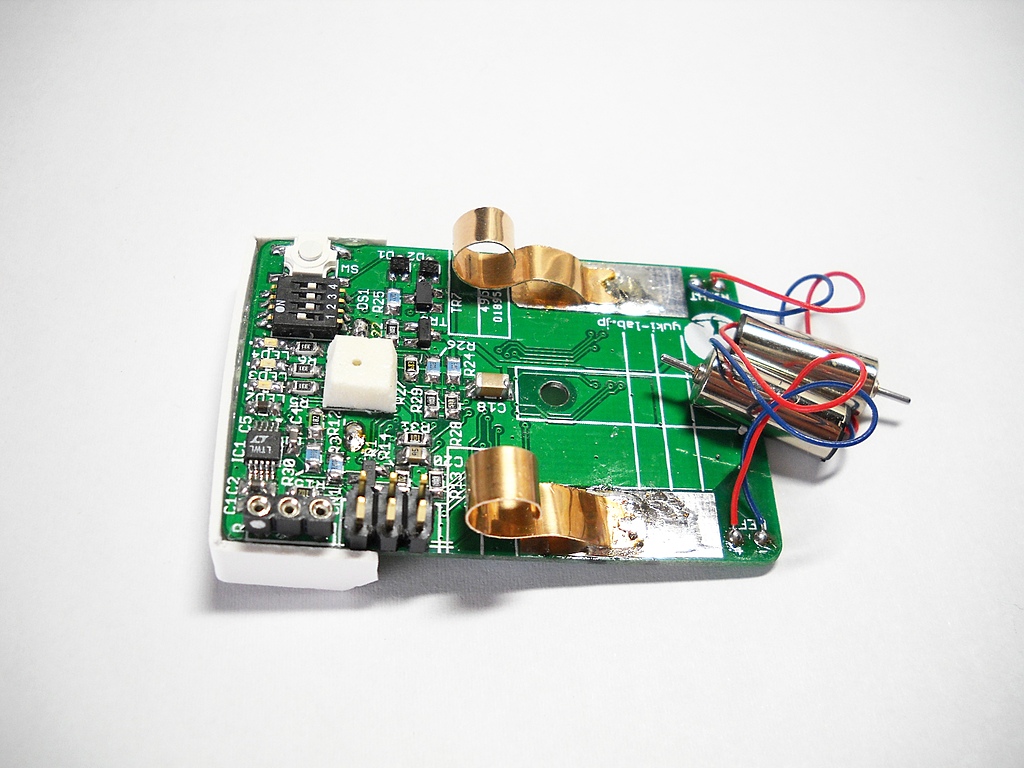 リン青銅板を曲げて前の物と交換します。固定はハンダづけのみ。
リン青銅板を曲げて前の物と交換します。固定はハンダづけのみ。
 モーターをはめ込んだところ。基板のリン青銅板を固定している部分はいろいろ試行錯誤できるように広く作ってあります。
モーターをはめ込んだところ。基板のリン青銅板を固定している部分はいろいろ試行錯誤できるように広く作ってあります。
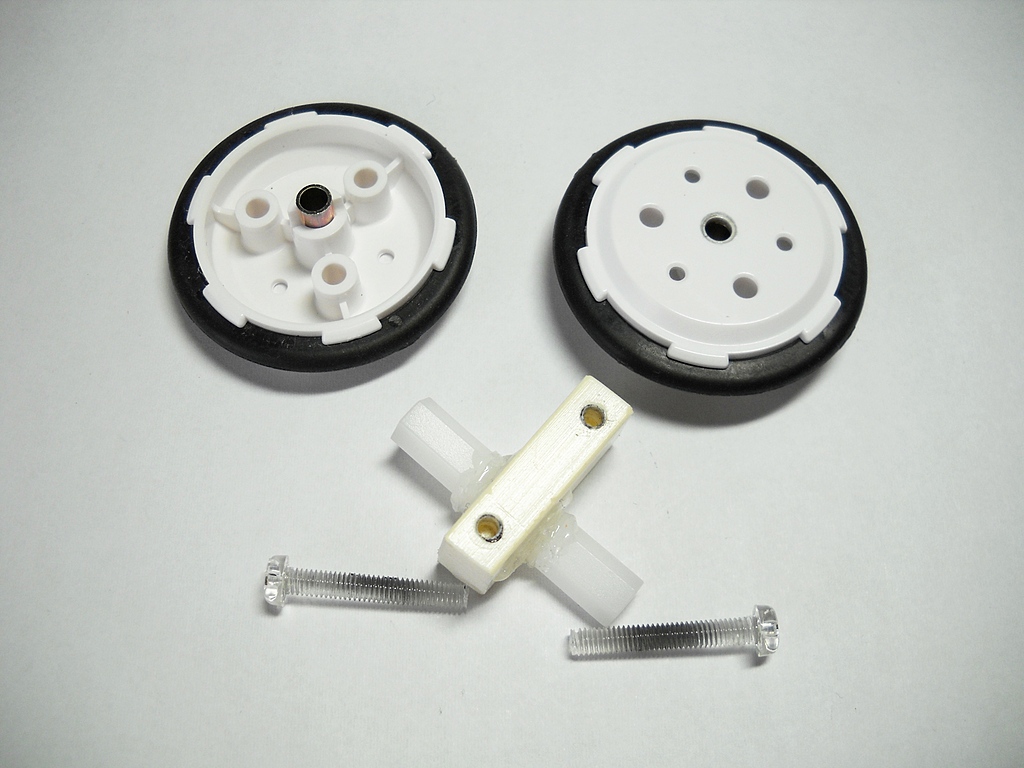 ついでに後輪の保持部分も少し曲がっていたので作り直します。画像は前のをバラしたところ。タイヤはタミヤのスリムタイヤセットの小さい方(φ36mm)です。これに外形4mm、内径3mm、長さ10mmの真鍮製スペーサをはめ込みます。車軸としてポリカーボネート製の 3mm x 20mmのネジを利用します。ネジの中程が黒いのはラジコン用のグリスを少量塗った為。
ついでに後輪の保持部分も少し曲がっていたので作り直します。画像は前のをバラしたところ。タイヤはタミヤのスリムタイヤセットの小さい方(φ36mm)です。これに外形4mm、内径3mm、長さ10mmの真鍮製スペーサをはめ込みます。車軸としてポリカーボネート製の 3mm x 20mmのネジを利用します。ネジの中程が黒いのはラジコン用のグリスを少量塗った為。
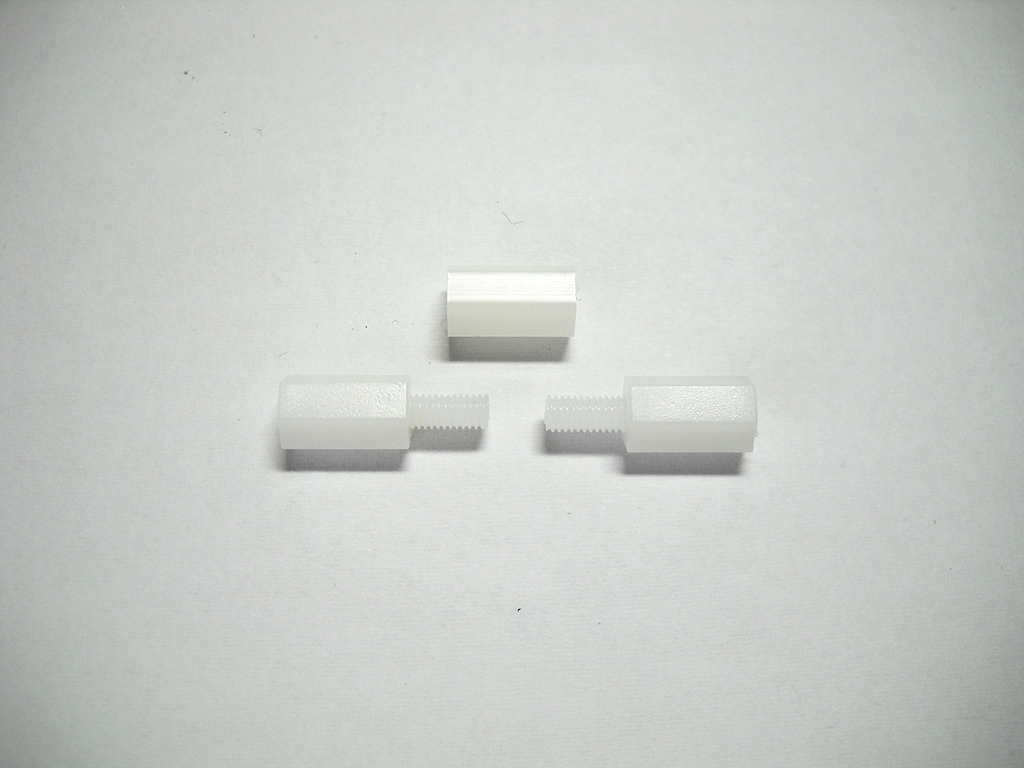 車軸の保持は 10mmのスペーサ3個を使っています。真ん中が貫通ネジのタイプで、両側がオスメスネジのタイプ。両側のスペーサの雄ネジ部分は長すぎるので少し切ってあります。
車軸の保持は 10mmのスペーサ3個を使っています。真ん中が貫通ネジのタイプで、両側がオスメスネジのタイプ。両側のスペーサの雄ネジ部分は長すぎるので少し切ってあります。
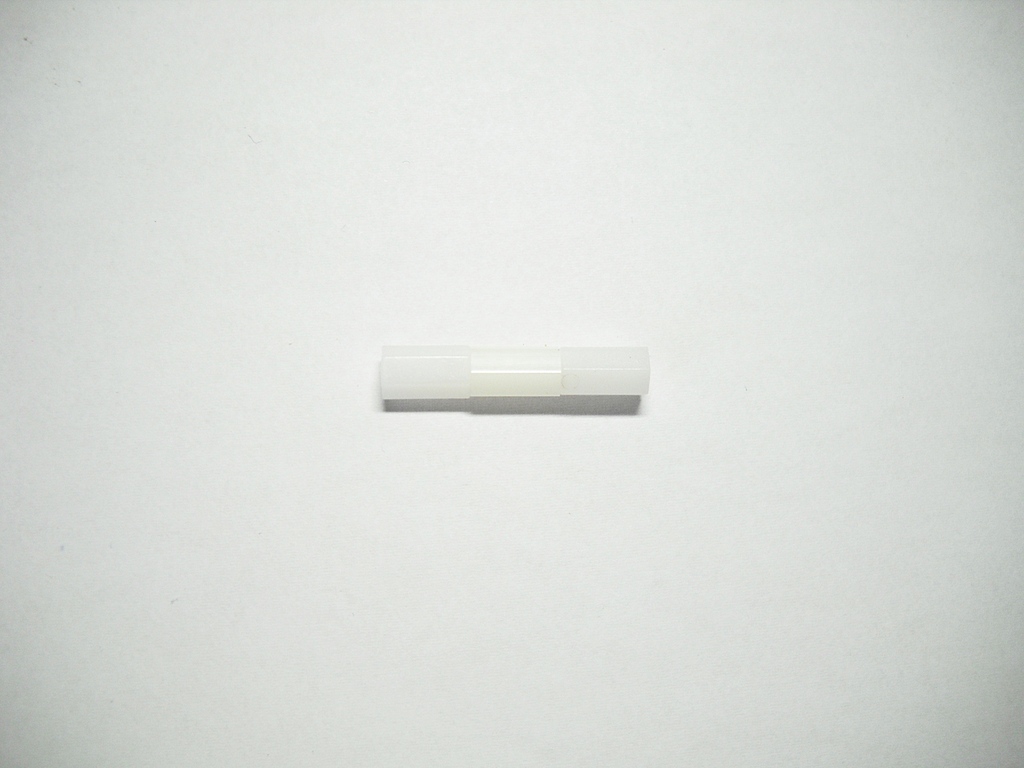 スペーサを組んだところ。最初から 30mmのスペーサを使えばいいような気もしますが、手持ちの部品の関係と、ネジの度当たりをどうやって作るかの問題があります。長いポリカーボネートのネジは入手しにくいし。1本の長いシャフトで済ませたいとも思いますが、今度は両脇でタイヤが外れないようにする為の固定を考える必要もあります。
スペーサを組んだところ。最初から 30mmのスペーサを使えばいいような気もしますが、手持ちの部品の関係と、ネジの度当たりをどうやって作るかの問題があります。長いポリカーボネートのネジは入手しにくいし。1本の長いシャフトで済ませたいとも思いますが、今度は両脇でタイヤが外れないようにする為の固定を考える必要もあります。
 DIY店で買ってきた6mm x 12mm x 1mのプラ棒を切り出して後輪車軸の保持具を作ります。
DIY店で買ってきた6mm x 12mm x 1mのプラ棒を切り出して後輪車軸の保持具を作ります。
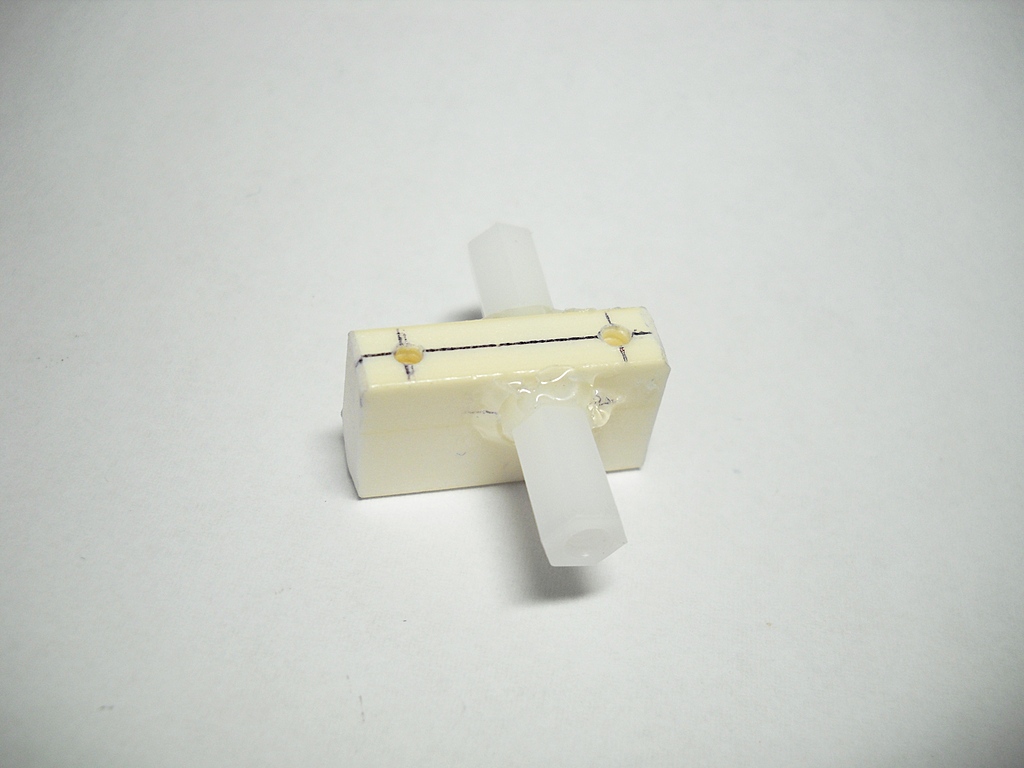 穴を開けてスペーサを差し込み、ホットボンドで固定します。ここで曲がるとまた作り直しです。
穴を開けてスペーサを差し込み、ホットボンドで固定します。ここで曲がるとまた作り直しです。
 後輪部分を取り付けます。ここでモーターのシャフトと後輪の当たり具合を調整します。ごくごく軽く、かつ、回転しても常に触れるように調整します。何度も取り付けたり外したりしながら調整します。コアレスモーターは過負荷でシャフトが回転しない状態で電流を流し続けると容易に焼損しますので、ここの調整は納得がいくまでやり直す必要があります。
後輪部分を取り付けます。ここでモーターのシャフトと後輪の当たり具合を調整します。ごくごく軽く、かつ、回転しても常に触れるように調整します。何度も取り付けたり外したりしながら調整します。コアレスモーターは過負荷でシャフトが回転しない状態で電流を流し続けると容易に焼損しますので、ここの調整は納得がいくまでやり直す必要があります。
ちなみにこの画像は古い軸受での画像ですが、まあ、こんな感じ。
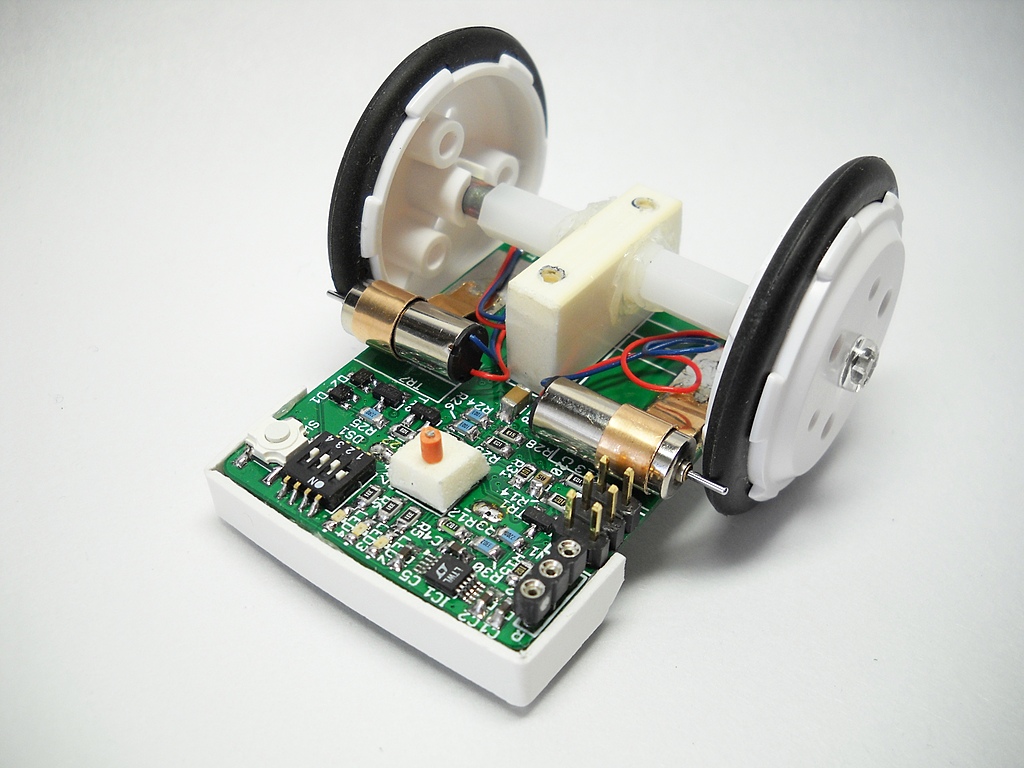
 モーターのシャフトの当たり具合が良さそうなら電池BOXを取り付けます。これで完成形態。
モーターのシャフトの当たり具合が良さそうなら電池BOXを取り付けます。これで完成形態。
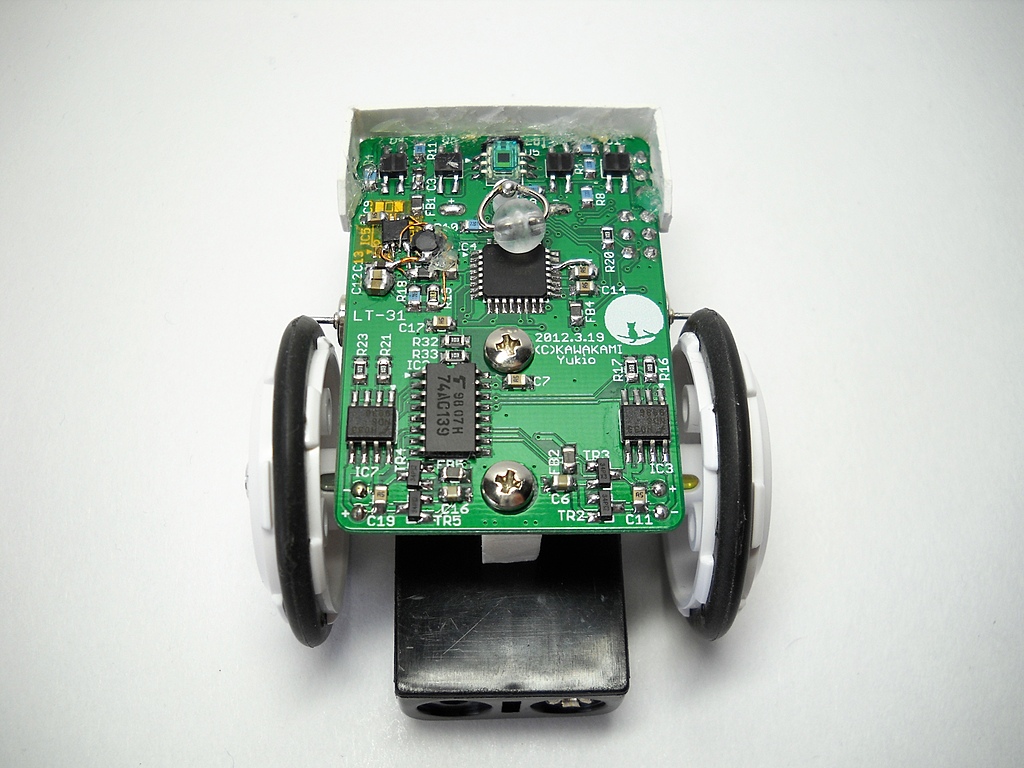 裏側。
裏側。
{kind=link}