| Top Page Index About Link Mail Form ●このページの応用機器製作します |
→ニッケル水素電池パック HHR-P104専用充電器の製作
→レーザーカット加工アクリルで作った Raspberry Piケース
その昔、タツノコプロのアニメに「ゴワッパー5(ファイブ)ゴーダム」というのがありました。5人の子供が巨大ロボットやメカに乗って悪と戦うというようなものだったと思いますが、正直あまり思い入れが無いので内容はほとんど忘れました。そのメカの一つに「ヤドカリジープ」というのがありました。ヤドカリをモチーフにした水陸両用車で、後輪はあるのに前輪は無くて鉤爪状の前足があります。いや、前輪はその鉤爪に内蔵されてたかもしれませんが、ともかく鉤爪で「歩く」動作が面白くてそれだけは憶えていました。
基本的にわたしは電気屋なので、極力簡単なメカで動くものを自作したいと思っておりまして、ヤドカリジープみたいなメカなら爪だけ作って後輪はタイヤで済ませれば簡単にできそう、というのを以前から構想してました。
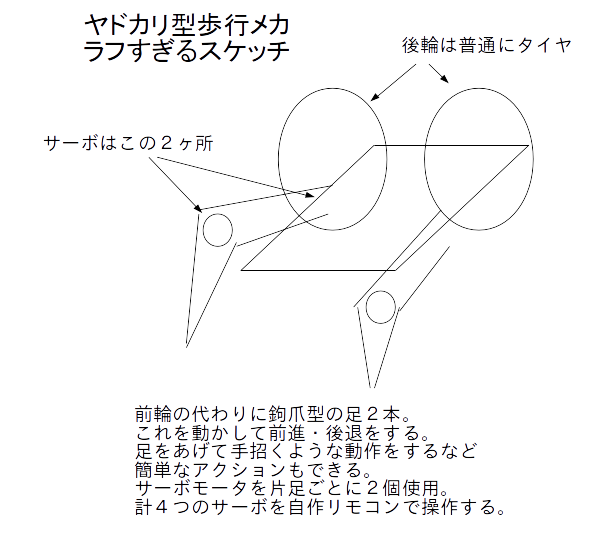 そんなわけで今年の Maker Faire Tokyo 2016に参加するのでヤドカリジープみたいなのをつくることにしました。申込時にはまだ影も形も無いので、その時に書いたラフ過ぎるスケッチがこちら。これでよく出展審査に受かったなあ。
そんなわけで今年の Maker Faire Tokyo 2016に参加するのでヤドカリジープみたいなのをつくることにしました。申込時にはまだ影も形も無いので、その時に書いたラフ過ぎるスケッチがこちら。これでよく出展審査に受かったなあ。
 基板は以前から作ってあったもの。サーボの制御基板には DC/DCコンバータを搭載してサーボ用の 4.8Vを作るつもりだったのですが、実際に動かしてみると容量不足と思われ、サーボ動作が不安定になってしまいました。結局、昇圧せずに電池電圧をそのままサーボ電源に加えています。今回使ったマイクロサーボ(SG90, SG92R)は定格 4.8Vですが、3V以上あれば問題なく動くようです。もちろん、トルクは小さくなっているのでしょうが、うちのメカは軽いので。
基板は以前から作ってあったもの。サーボの制御基板には DC/DCコンバータを搭載してサーボ用の 4.8Vを作るつもりだったのですが、実際に動かしてみると容量不足と思われ、サーボ動作が不安定になってしまいました。結局、昇圧せずに電池電圧をそのままサーボ電源に加えています。今回使ったマイクロサーボ(SG90, SG92R)は定格 4.8Vですが、3V以上あれば問題なく動くようです。もちろん、トルクは小さくなっているのでしょうが、うちのメカは軽いので。
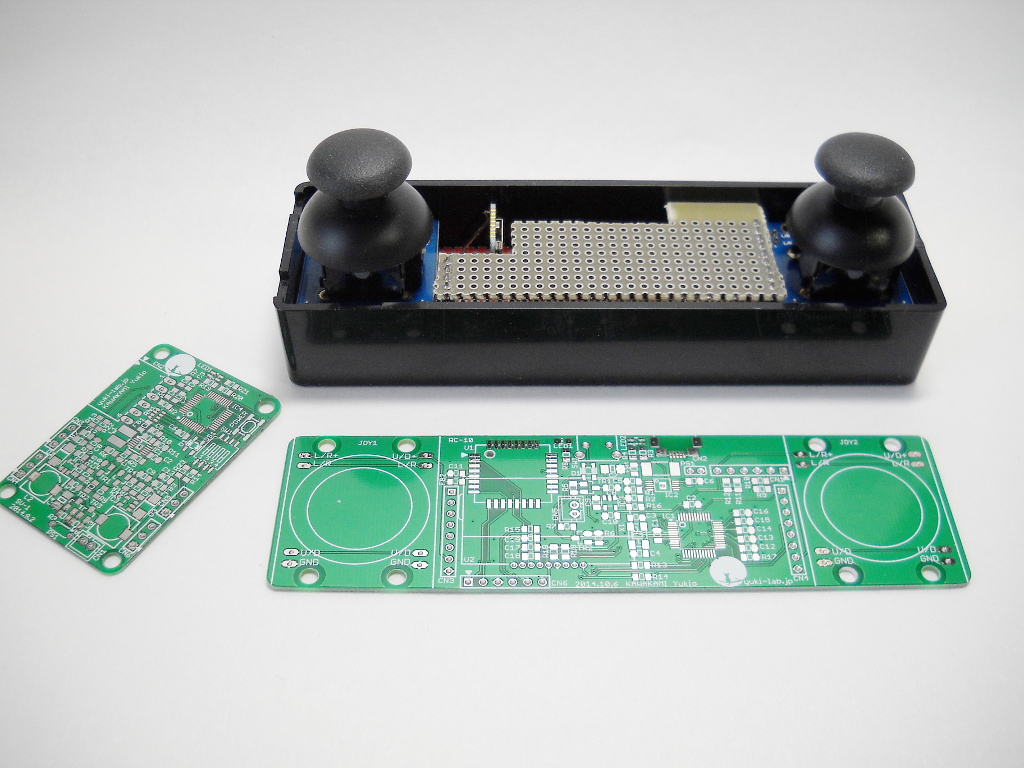
サーボ基板回路図(PDF):ただし、実際は LM2735の DC/DCコンバータは部分は使わずにパスしています。また、ディップスイッチも外して無線モジュールをつないでいます。
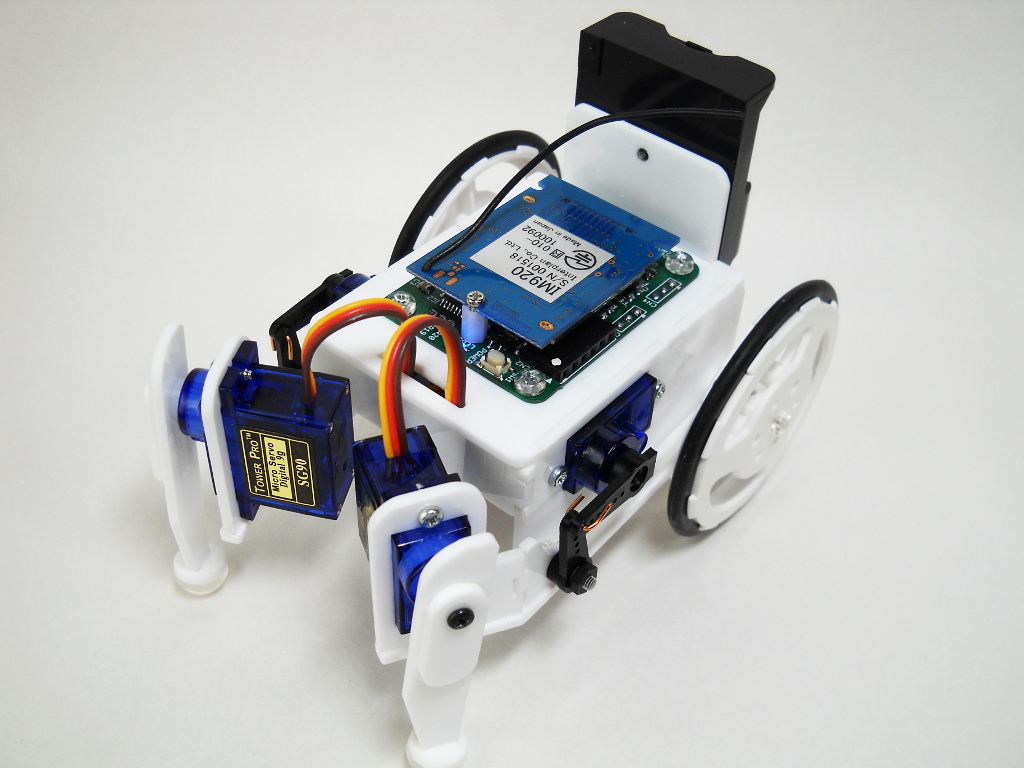
リモコンとメカの通信には市販の無線モジュールを使います。インタープランの IM920を使っています。当初はもっと安価な 2.4GHz帯のモジュールを使おうと思ったのですが、ビッグサイトの環境下では使い物にならないような気がしたのでこれにしました。液晶表示やリチウムイオン電池の充電回路なども基板上にあるのですが使っていません。回路的には MCUにジョイスティックと無線モジュールがつながっているだけになっています。
 試作零号機。ボディはタカチのケース SW-75Gを使い、脚部は 1mm厚のフォーレックスをカッターで切り出して作っています。1枚だと弱いので2枚貼りあわせてありますが、それでもしなってグラグラします。まあ、試作ですし。
試作零号機。ボディはタカチのケース SW-75Gを使い、脚部は 1mm厚のフォーレックスをカッターで切り出して作っています。1枚だと弱いので2枚貼りあわせてありますが、それでもしなってグラグラします。まあ、試作ですし。
タイヤはタミヤのスリムタイヤセットの 55mm径の方を使っています。以前、ライントレーサを作った時の余りだったりします。
リモコンのケースはタカチの SW-140Gを使用。
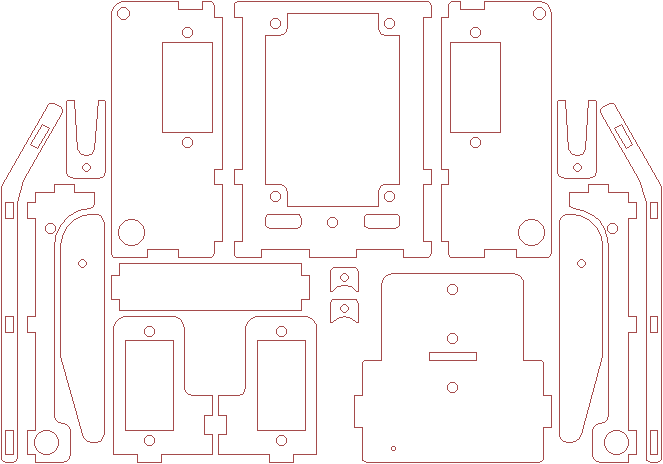 脚部の剛性強化と美化の為、アクリルを業者に出してレーザーカット加工をしてもらうことにします。せっかくなのでボディも同時に。
脚部の剛性強化と美化の為、アクリルを業者に出してレーザーカット加工をしてもらうことにします。せっかくなのでボディも同時に。
その図面です。これは2号機のもの。
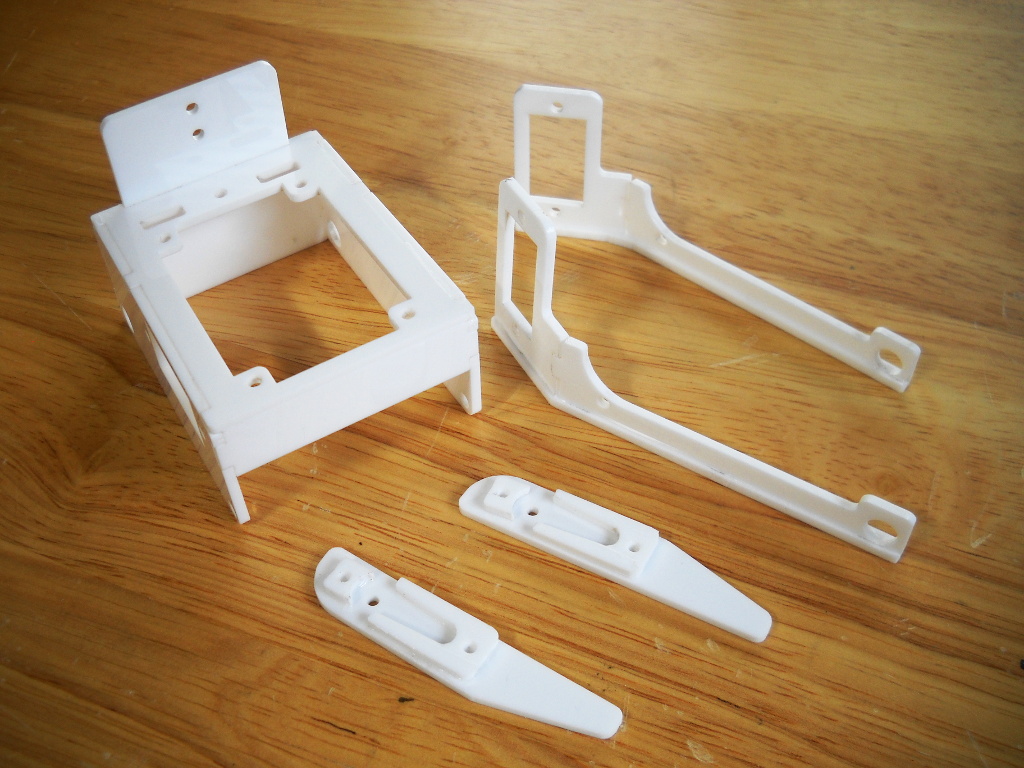
 届いたアクリルパーツ。当たり前だけど図面通りだ。さすがレーザーカット。
届いたアクリルパーツ。当たり前だけど図面通りだ。さすがレーザーカット。
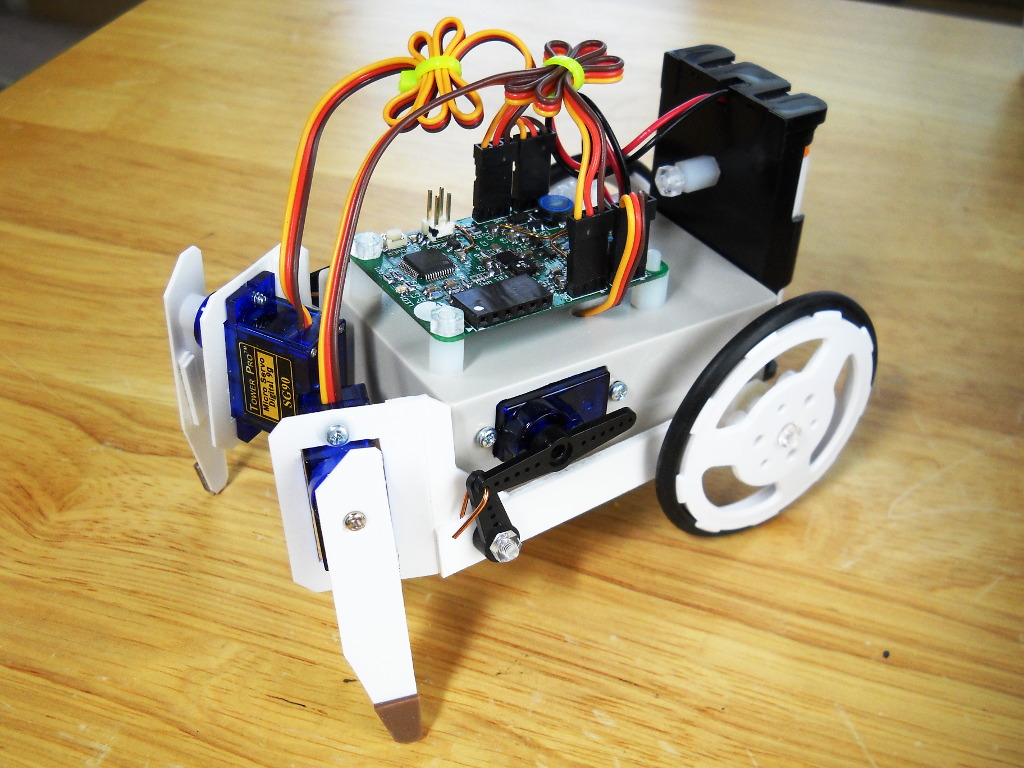
 アクリルを組み上げたもの。あとはタイヤとサーボでメカは全て。単純です。
アクリルを組み上げたもの。あとはタイヤとサーボでメカは全て。単純です。
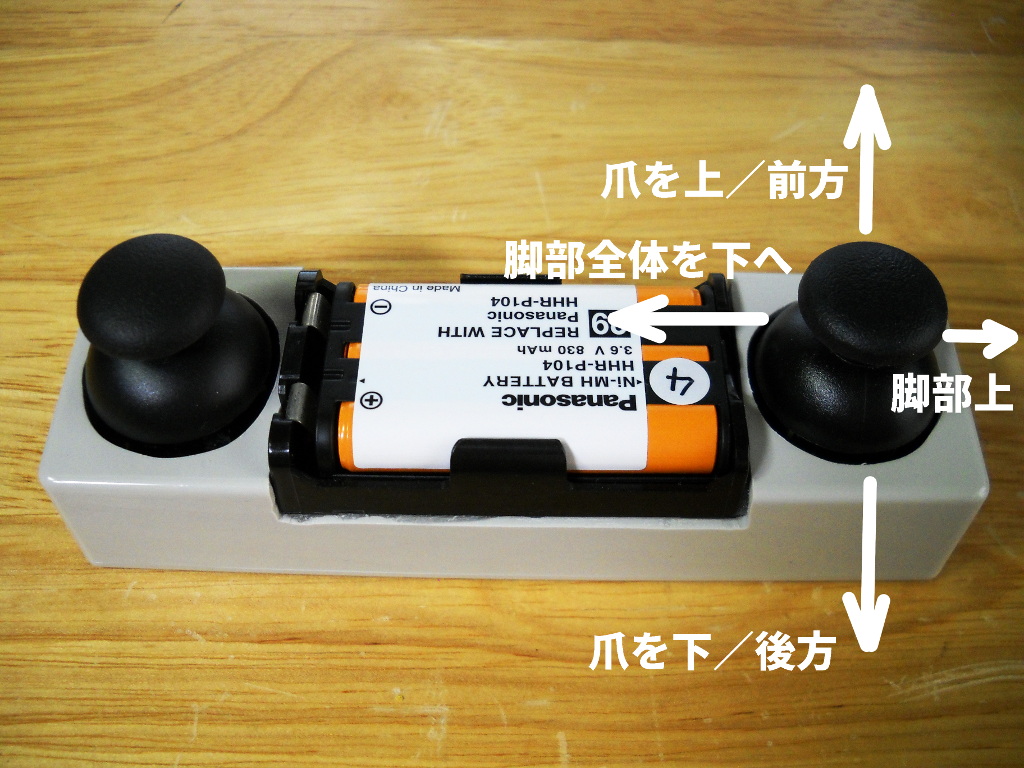 リモコン操作。ジョイスティックを前方に倒すと爪を前方・上に動かします。後方に倒すと後方・下になります。内側に倒すと脚部全体を下に動かします。外側は上に。
リモコン操作。ジョイスティックを前方に倒すと爪を前方・上に動かします。後方に倒すと後方・下になります。内側に倒すと脚部全体を下に動かします。外側は上に。
ジョイスティックを内側に回すと脚が地面を蹴って進みます。左右交互にタイミング良く回すと前進するはずですが、これが以外に難しい。コツとしては「内側、えぐりこむように打つべし、打つべし!」
操作が難しいので自動歩行モードも備えています。左右には傾けず、中立の状態で前方いっぱいに倒し、1秒以上保持すると自動歩行モードに移行し、脚部が勝手に動きます。左右を両方自動歩行モードにすればまっすぐ進みます。手前いっぱいに倒した場合は後退します。
爪はまっすぐではなく、30度傾けてあるので、地面を掻く度に少し向きが変わります。なので、左右で爪を振る角度を変えることで旋回・向きを変えることが可能です。
1号機の動画です。この撮影時はまだ慣れてないこともあり、途中で自動歩行モードで動かしています。単純な脚2本ですらこれなのに、人型ロボットの操縦なんてどれほど難しいことか。
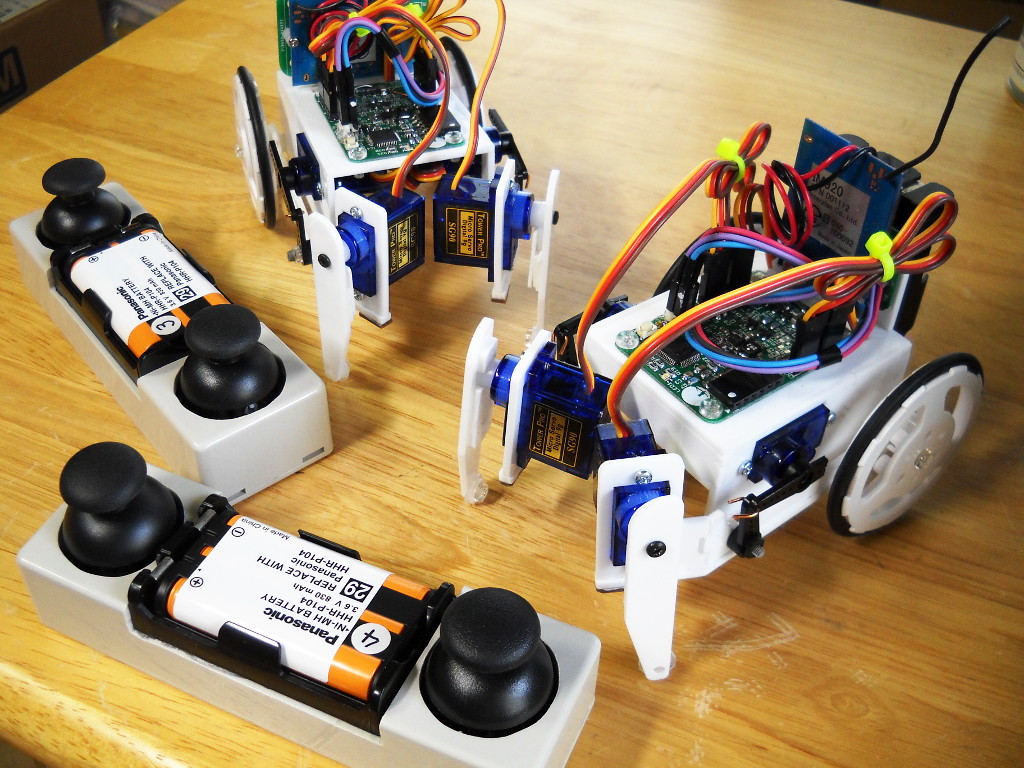
 試作を含めた3台とリモコン。
試作を含めた3台とリモコン。
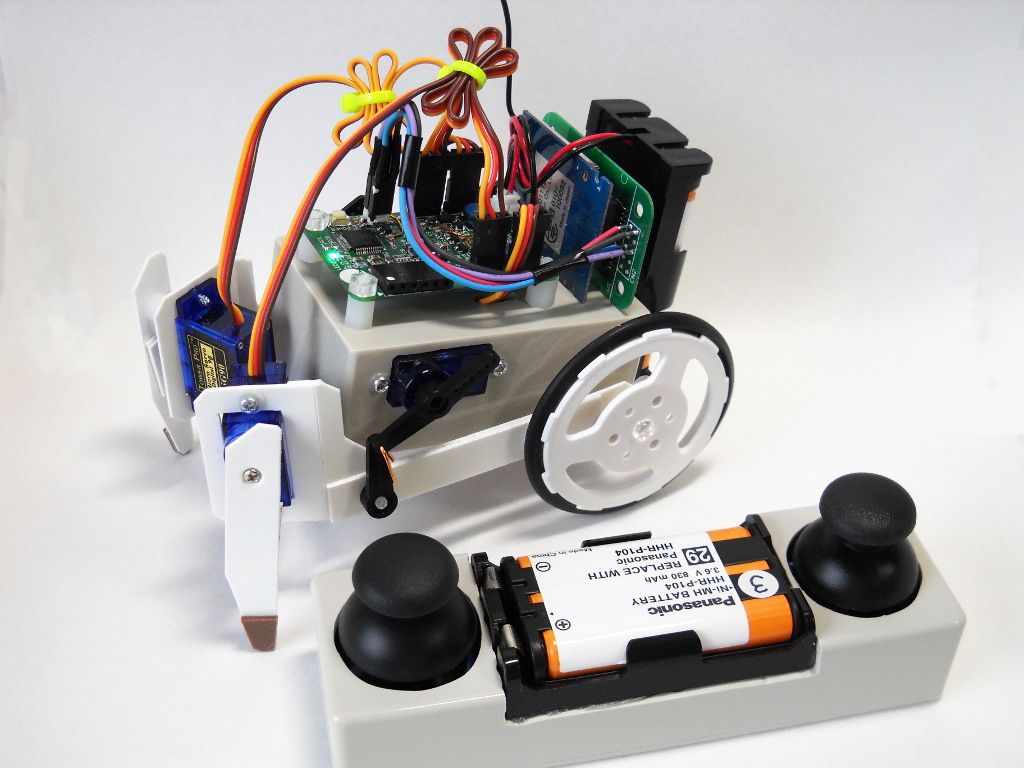
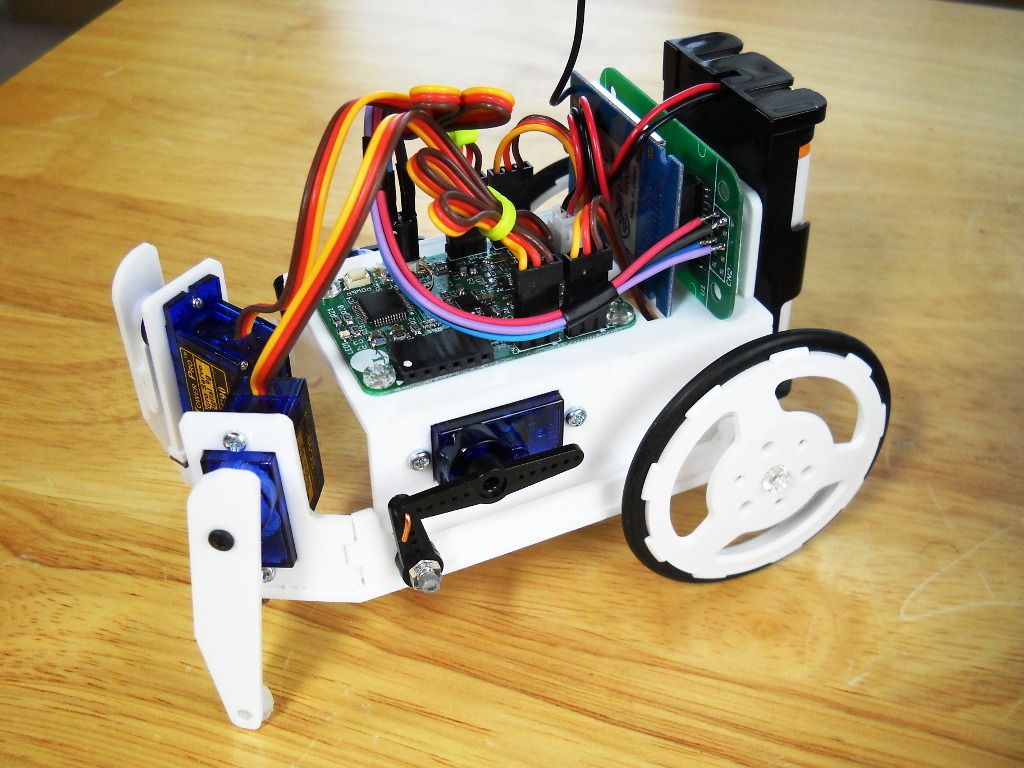
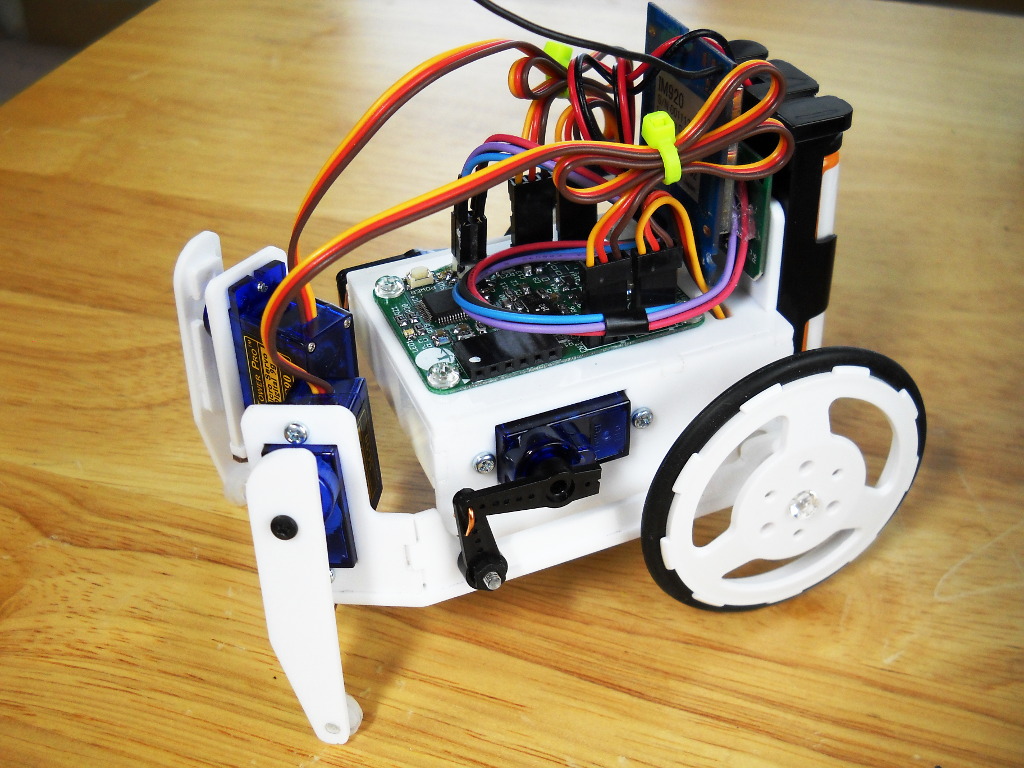
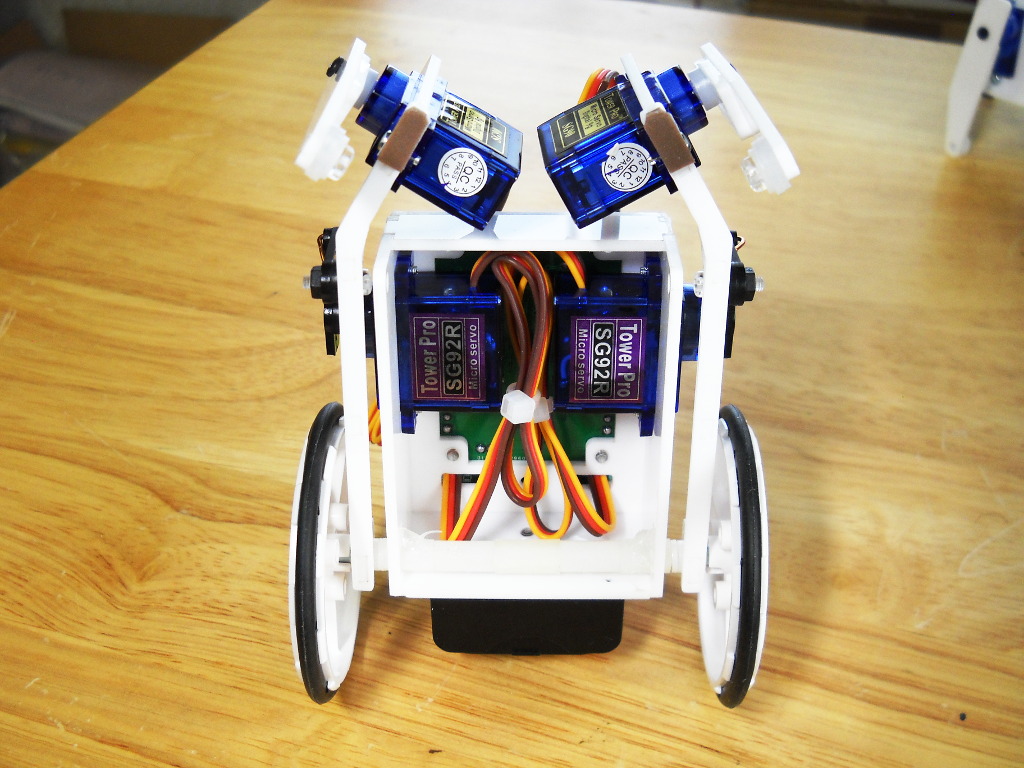
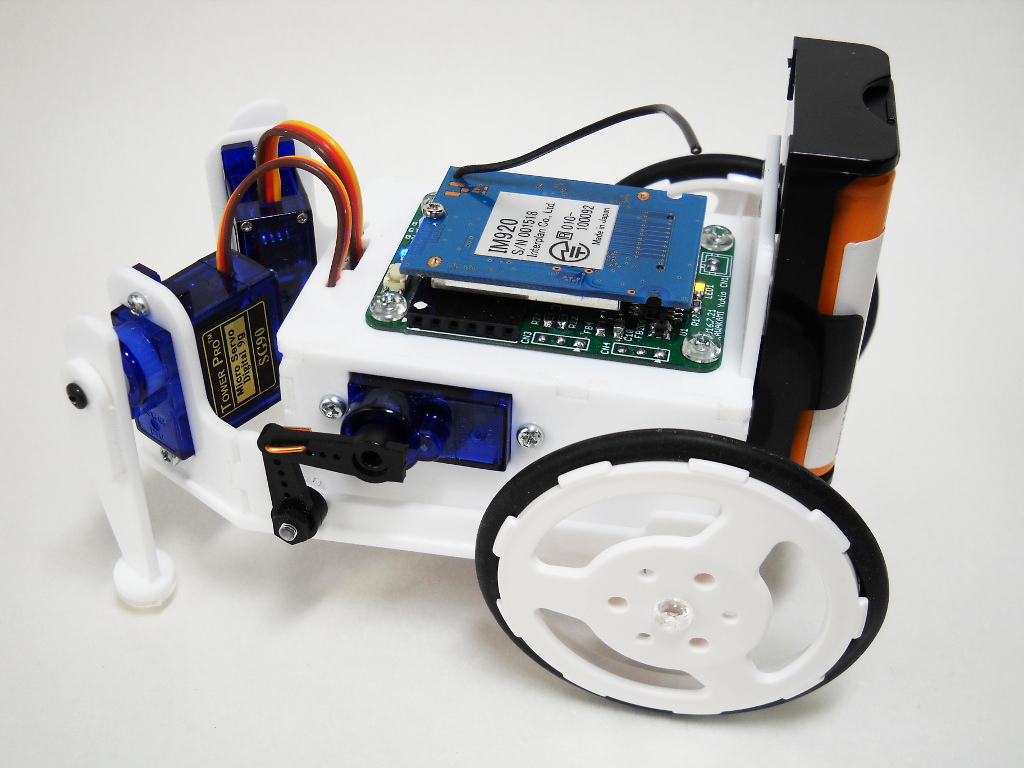
 試作零号機。この画像では無線モジュールは外してあります。全体のデザインはこの段階でほぼ完成しており、1、2号機とそれほど大差ありません。まあ、デザインっつっても単純な形ですけど。
試作零号機。この画像では無線モジュールは外してあります。全体のデザインはこの段階でほぼ完成しており、1、2号機とそれほど大差ありません。まあ、デザインっつっても単純な形ですけど。
サーボは爪の上下は SG90、ブームの上下は SG92Rを使っていますが、余裕があるので両方 SG90でもよかったかもしれません。
 1号機。寸法は試作零号機を踏襲しています。全長約120mm、幅約85mm、高さ約85mm。
1号機。寸法は試作零号機を踏襲しています。全長約120mm、幅約85mm、高さ約85mm。
 2号機。1号機よりも長さを 10mm短くしているので少しちんまりした感じ。
2号機。1号機よりも長さを 10mm短くしているので少しちんまりした感じ。
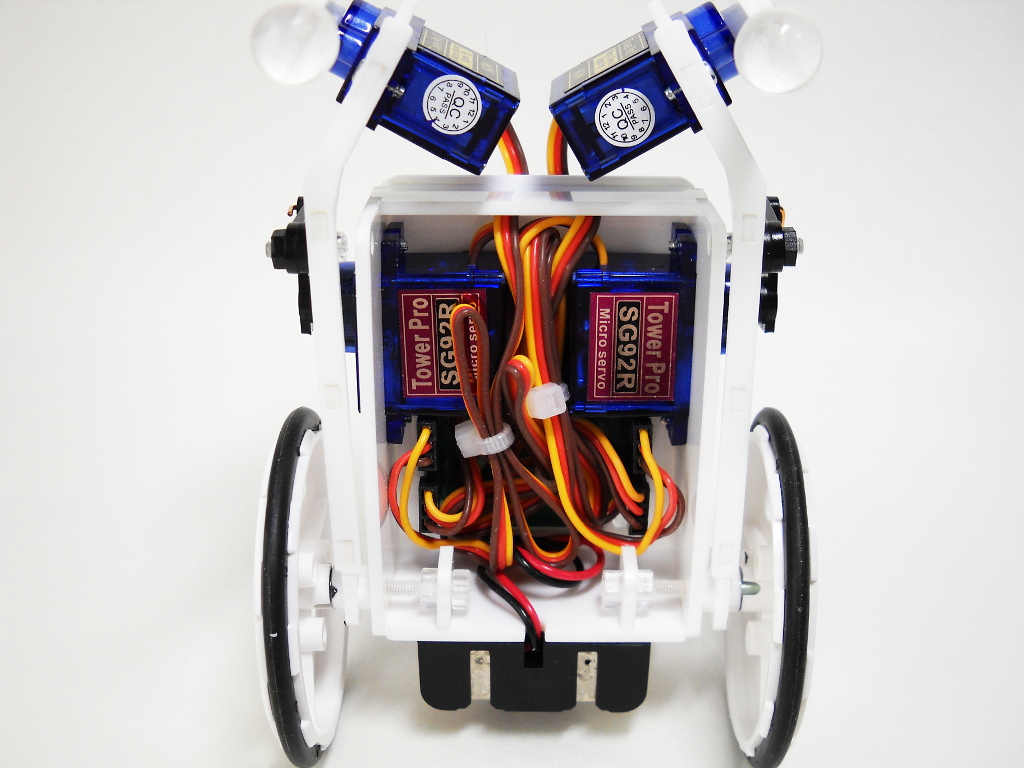
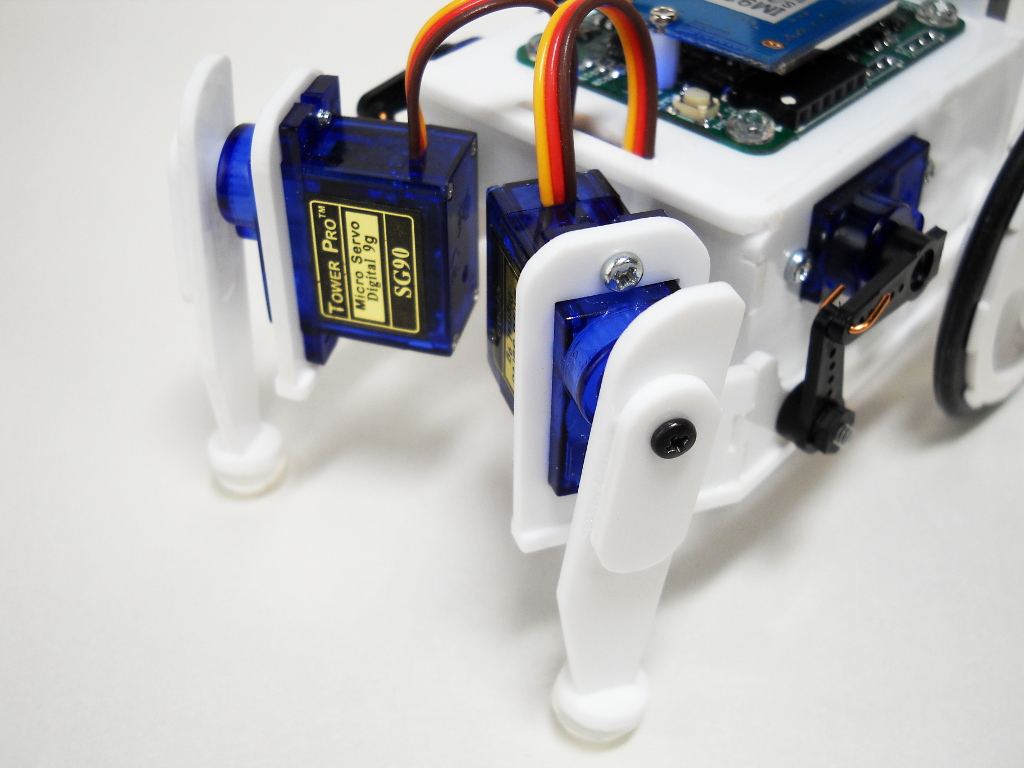
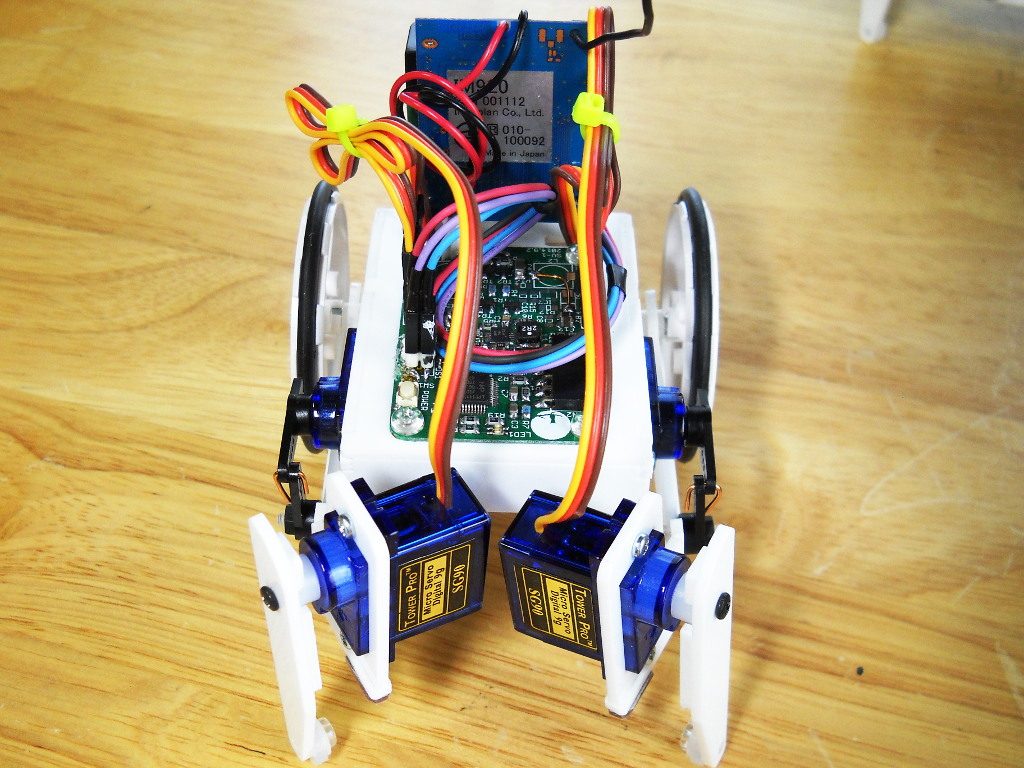 2号機正面。爪のサーボはもう少し小さい方がいいのですが、入手のしやすさなどもあるし。サーボはそのうち壊れて交換することを前提に。
2号機正面。爪のサーボはもう少し小さい方がいいのですが、入手のしやすさなどもあるし。サーボはそのうち壊れて交換することを前提に。
 2号機側面。
2号機側面。
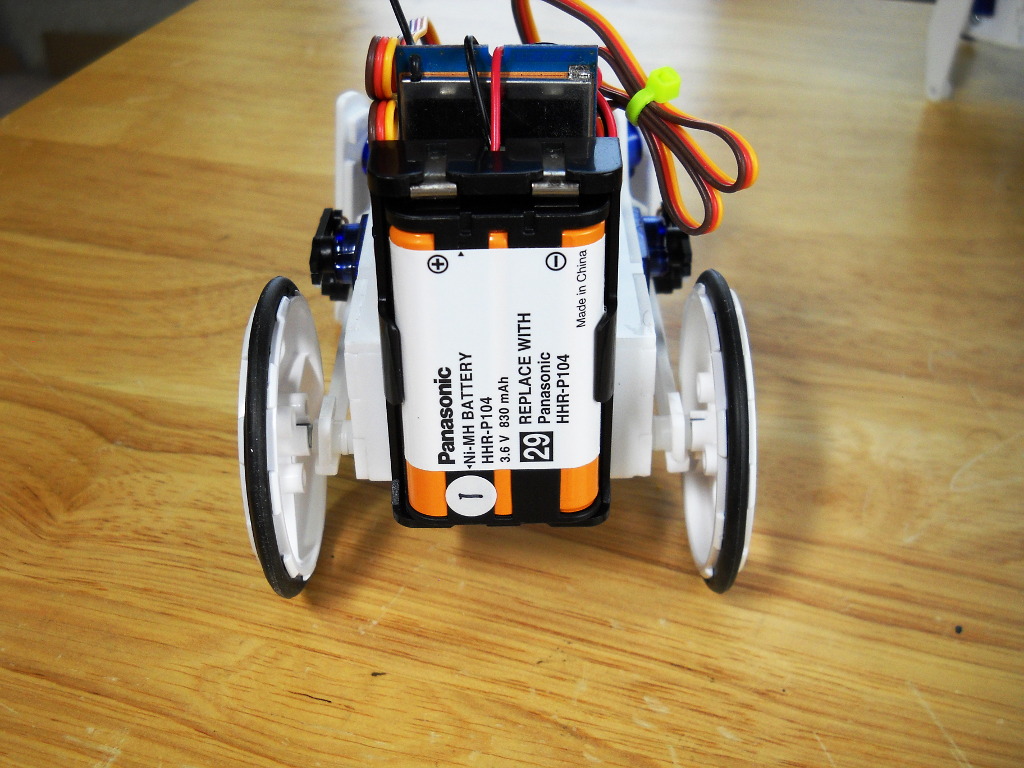 2号機背面。電池はパナソニック HHR-P104電池パックを使用。このために充電器も作りました。
2号機背面。電池はパナソニック HHR-P104電池パックを使用。このために充電器も作りました。
通常の単4電池3本でもいいのですが、やはり数が多くなると扱いが面倒です。リチウムイオン電池なら軽量・大容量なのがありますが、展示会向けには本体充電方式よりも交換方式の方が便利です。ケータイやデジカメ用のリチウムイオン電池パックというのもありますが、高価だし。
 2号機底面。ボディ内部にはサーボと後輪の軸受けしかありません。電池はこちらに入れようと思えば入れられるスペースがあります。その方が爪に重量がかかり、爪の滑りが抑えられてよかったかもしれません。
2号機底面。ボディ内部にはサーボと後輪の軸受けしかありません。電池はこちらに入れようと思えば入れられるスペースがあります。その方が爪に重量がかかり、爪の滑りが抑えられてよかったかもしれません。
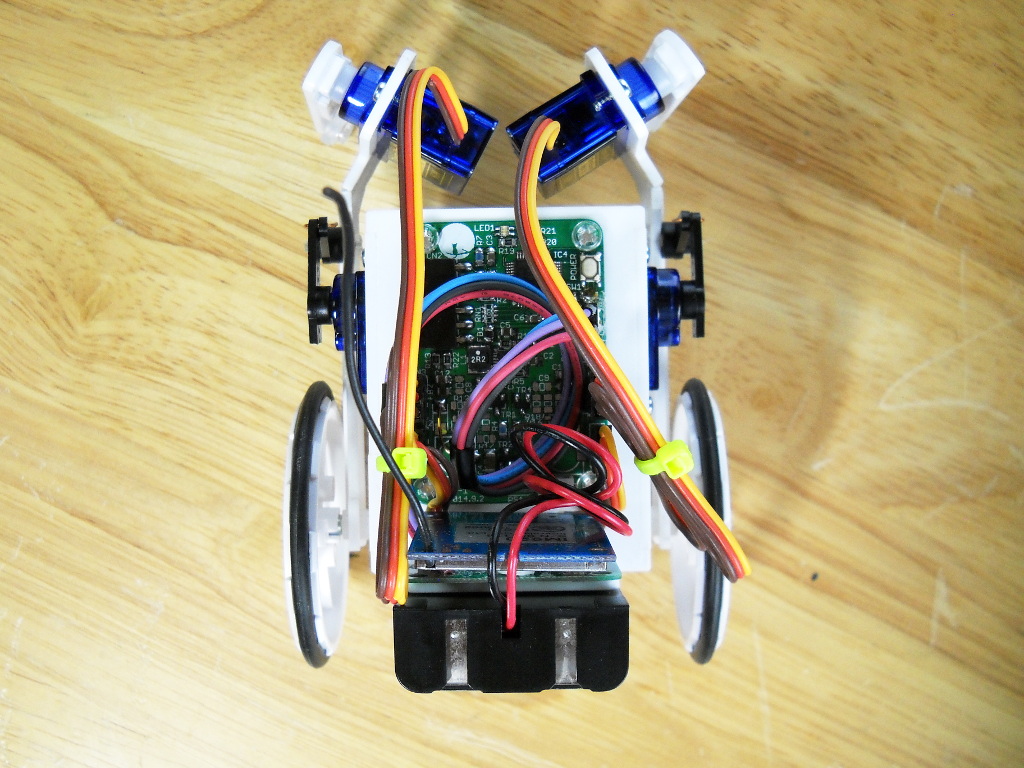 2号機上面。
2号機上面。
 リモコン。こちらも HHR-P104電池パックを使っています。ちょっと大きめですが、メカと共通の電池を使った方が何かと便利なので。Maker Faireの場合、リチウムイオン電池を使う場合は危険物持ち込み許可をとる必要があり、面倒という理由もあります。
リモコン。こちらも HHR-P104電池パックを使っています。ちょっと大きめですが、メカと共通の電池を使った方が何かと便利なので。Maker Faireの場合、リチウムイオン電池を使う場合は危険物持ち込み許可をとる必要があり、面倒という理由もあります。
 2号機の体重測定。電池込みで約160gです。ちなみに1号機も 10mm長いにもかかわらずほぼ同じ重さ。
2号機の体重測定。電池込みで約160gです。ちなみに1号機も 10mm長いにもかかわらずほぼ同じ重さ。
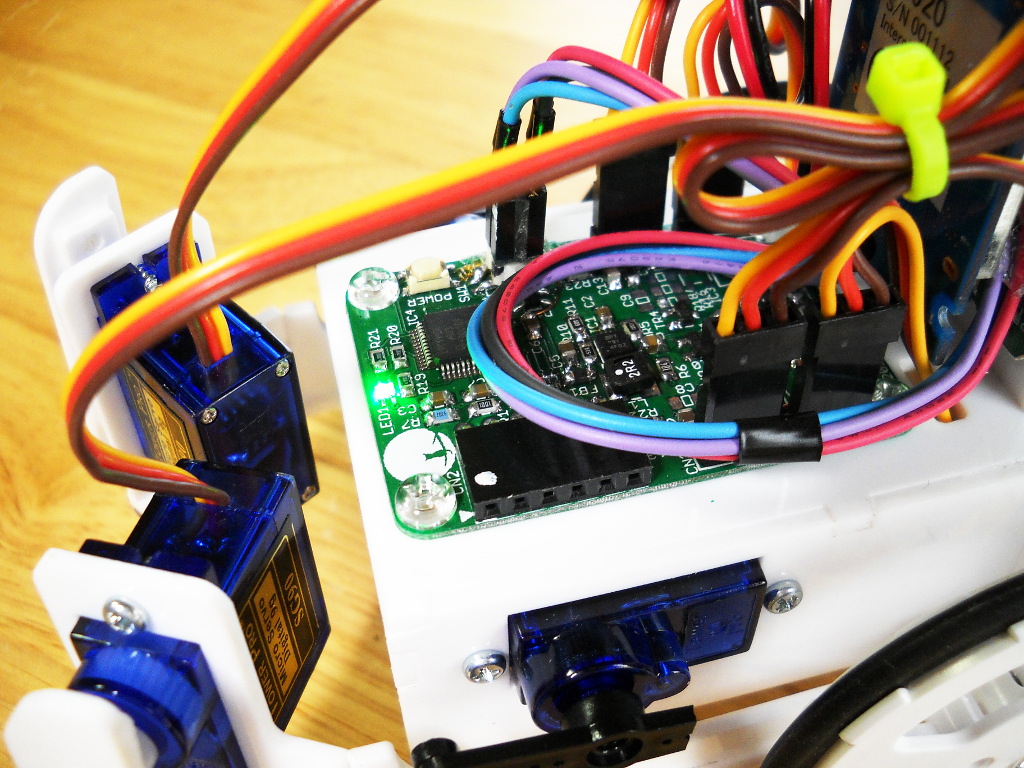 基板部分のクローズアップ。奥に電源ボタンがあります。手前のコネクタは MCUのシリアル I/Fで、ここにシリアルアダプタをつなぐと各種設定やデバッグ、ファームウェアの書き込みなどができます。
基板部分のクローズアップ。奥に電源ボタンがあります。手前のコネクタは MCUのシリアル I/Fで、ここにシリアルアダプタをつなぐと各種設定やデバッグ、ファームウェアの書き込みなどができます。
手前が2号機で奥が1号機。それとリモコン。同じチャンネル(周波数)で同時動作が可能です。920MHzの特定小電力モジュールは混信・妨害を避けるためにモジュール自体でバンドが空いていることを確認してから送信する動作をします。新しいバンドなのでこの機能が無いと免許が降りません。
3セットになると同一チャンネルでは信号がぶつかり合って無理かも。その場合はチャンネルを変えてやればいいでしょう。
このシステムの場合、メカは目視できないと意味がないのでリモコンの無線モジュールの出力は最低限の 0.1mWに設定してます。また、メカ側のモジュールは送信はせず、受信のみになっています。
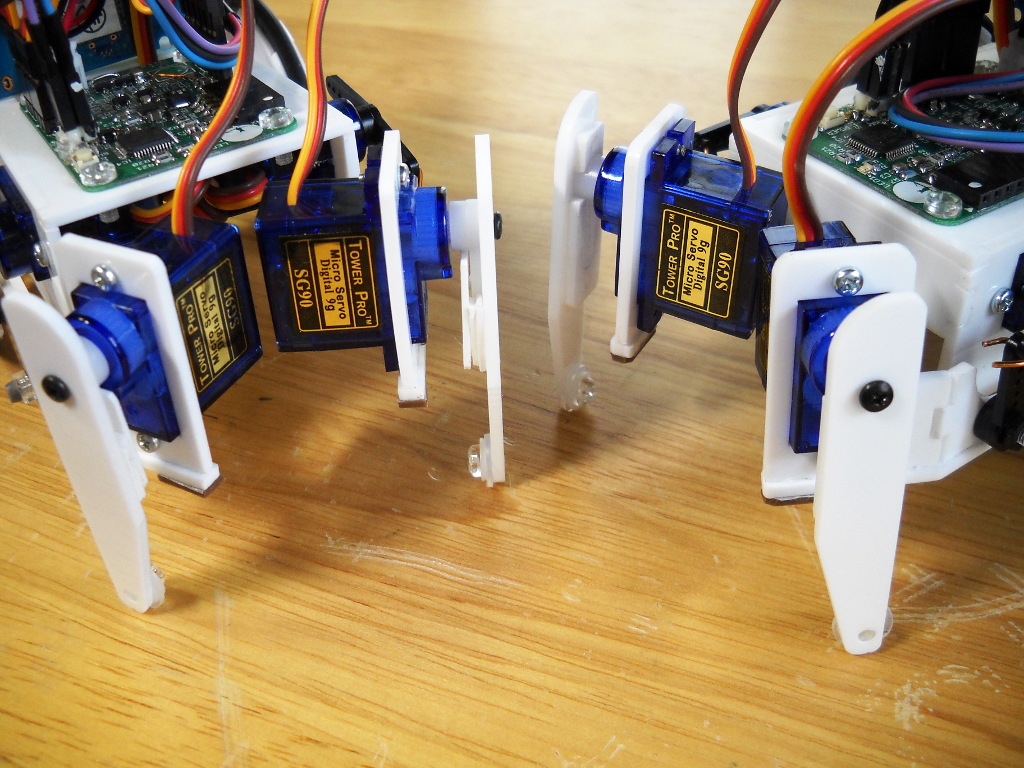 爪先の衝撃吸収兼滑り止めは 8mm径のシリコンゴムの平ワッシャを使っています。タチコマ方式と呼んでいます。
爪先の衝撃吸収兼滑り止めは 8mm径のシリコンゴムの平ワッシャを使っています。タチコマ方式と呼んでいます。
シリコンゴムの平ワッシャは画像では1枚(もう1枚写ってるのは固定用のジュラコンワッシャ)ですが、今は2枚入れています。それでも少々滑り易いので新しい「肉球方式」を考案、脚部だけアクリル発注中です。
 2016.8.2
2016.8.2
発注していたアクリルが来たので肉球化を試す。うーん、思ったより滑りやすいなあ。まあいいか。
 2016.8.19
2016.8.19
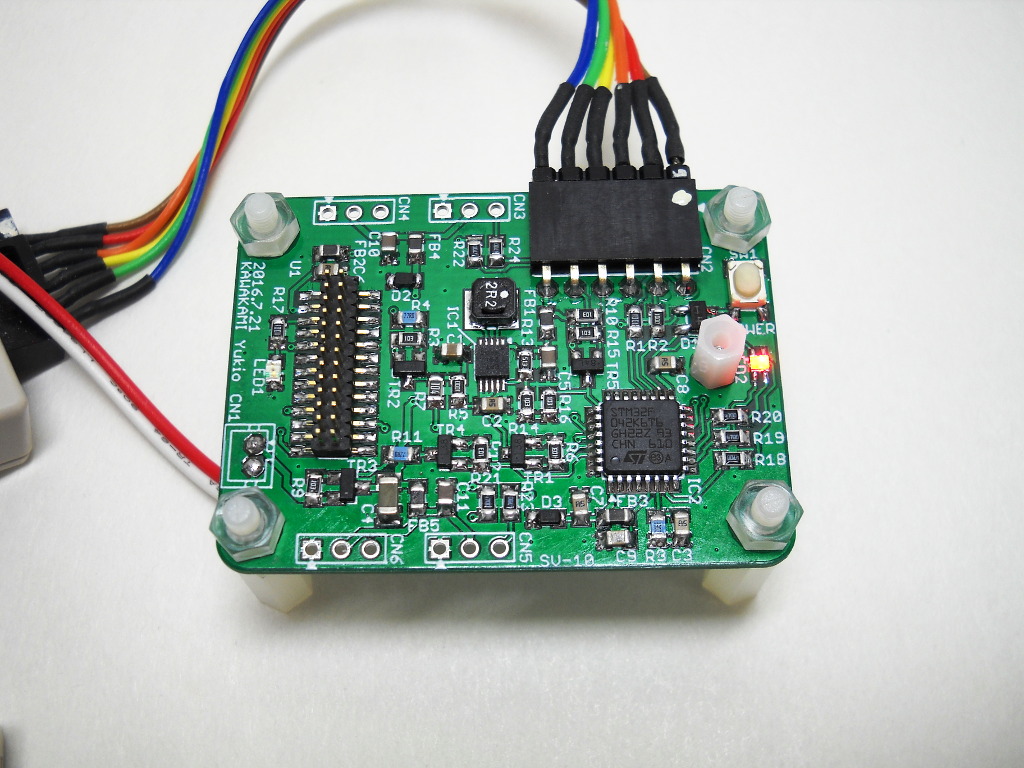
Makfer Faire Tokyo 2016は終わりましたが、ハムフェアに向けてもう少し改良します。画像は新しく作った基板。DC/DCコンバータを省いた部分に無線モジュールのコネクタを実装しました。あと、秋月で STM32F042K6T6が安く売られるようになったので使ってみました。
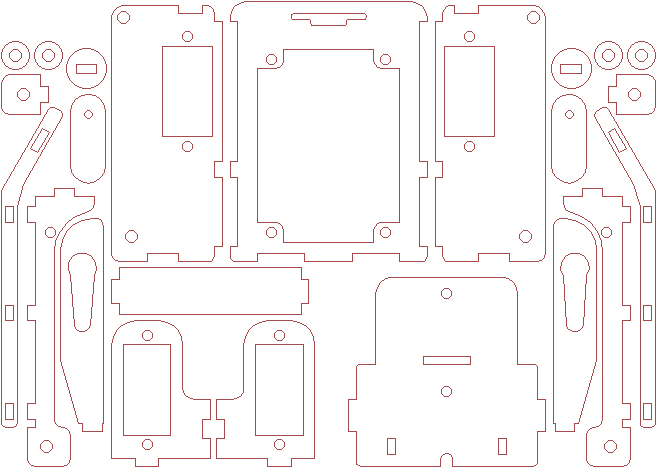 新しいボディのアクリル加工図面。
新しいボディのアクリル加工図面。
 新型ボディ。ケーブル類をボディ内部に収めて防御力UP。
新型ボディ。ケーブル類をボディ内部に収めて防御力UP。
リモコンは変更ありません。
 内部。サーボと電池のケーブルが収まっています。また、後輪の軸受けを変更して市販のスペーサーを使わなくていいようにしてあります。
内部。サーボと電池のケーブルが収まっています。また、後輪の軸受けを変更して市販のスペーサーを使わなくていいようにしてあります。
 すっきりしたので一段とタチコマっぽく。
すっきりしたので一段とタチコマっぽく。
 側面。
側面。
 基板のクローズアップ。無線モジュールが基板を覆っているのでなんか安心感。
基板のクローズアップ。無線モジュールが基板を覆っているのでなんか安心感。
 脚部。爪の付け根を微妙に変更し、サーボホーンと爪を一体化しました。と言ってもネジをとれば外れますが。
脚部。爪の付け根を微妙に変更し、サーボホーンと爪を一体化しました。と言ってもネジをとれば外れますが。